

Soft wearable robot for elbow movement function rehabilitation
A motion function and robot technology, applied in passive exercise equipment, physical therapy and other directions, can solve the problems of increasing user discomfort, uneven distribution of auxiliary force, lack of axial ductility, etc., to reduce discomfort , Improve wearability and ensure the effect of power transmission efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further explained below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the following specific embodiments are only used to illustrate the present invention and are not intended to limit the scope of the present invention.
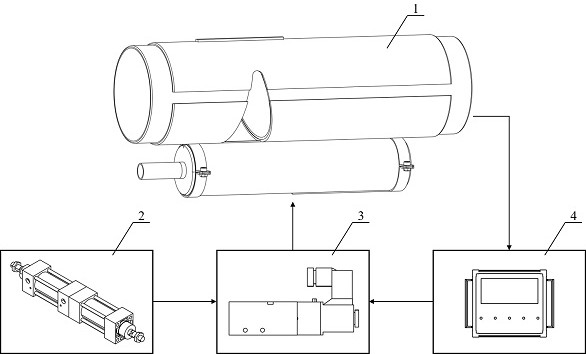
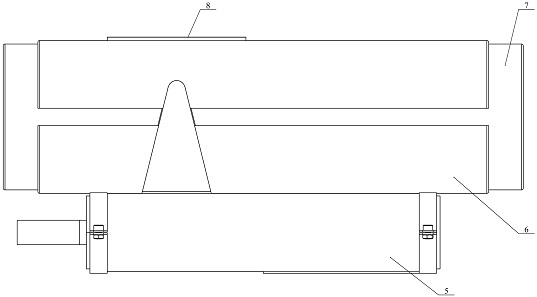
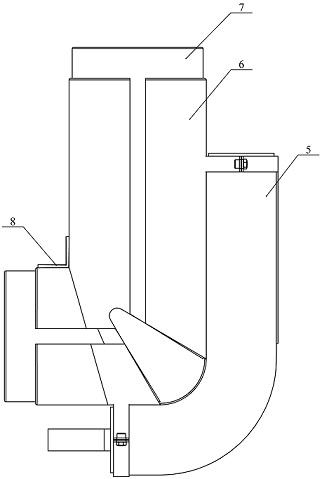
[0029] This example describes a soft wearable robot for the rehabilitation of elbow motor function, and its overall structure schematic diagram is shown in figure 1 As shown, it includes a soft wearable robot body assembly 1, a cylinder 2, an electromagnetic proportional valve 3 and a controller 4. The soft wearable robot body assembly 1 is tightly covered on the elbow of the human body; the cylinder 2 is used as a power source to provide driving force for the soft wearable robot body assembly 1; the electromagnetic proportional valve 3 communicates with the The soft wearable robot body assembly 1 is airtightly connected with the cylinder 2 for adjusting the internal ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More