

Lane line extraction method and device, vehicle and storage medium
An extraction method and lane line technology, applied in the field of lane line detection, can solve the problem of low accuracy of lane line recognition, and achieve the effect of improving the recognition accuracy and reducing constraints.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
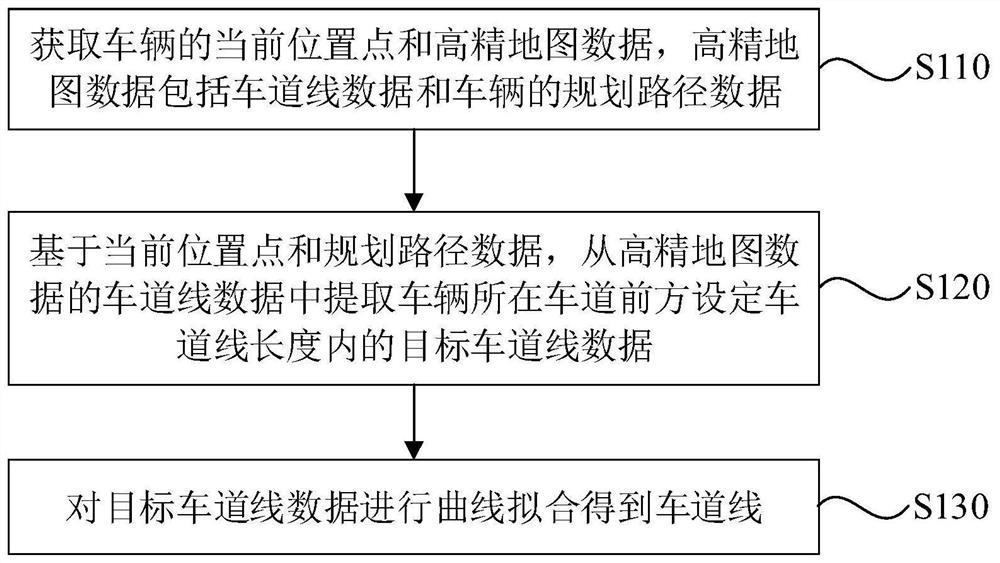
[0024] figure 1 This is a flowchart of a method for extracting lane lines provided in Embodiment 1 of the present invention. This embodiment is applicable to the case of extracting lane lines based on a high-precision map, and the method can be executed by the apparatus for extracting lane lines in this embodiment of the present invention. The apparatus can be implemented in software and / or hardware.
[0025] like figure 1 As shown, the method specifically includes the following steps:
[0026] S110: Acquire a current position point of the vehicle and high-precision map data, where the high-precision map data includes lane line data and planned path data of the vehicle.
[0027] High-precision map refers to a map with high precision and fine definition, and its accuracy can reach the decimeter level and can distinguish each lane. The refined definition refers to the various traffic elements in the traffic scene using the formatted storage method of the high-precision map, t...
Embodiment 2
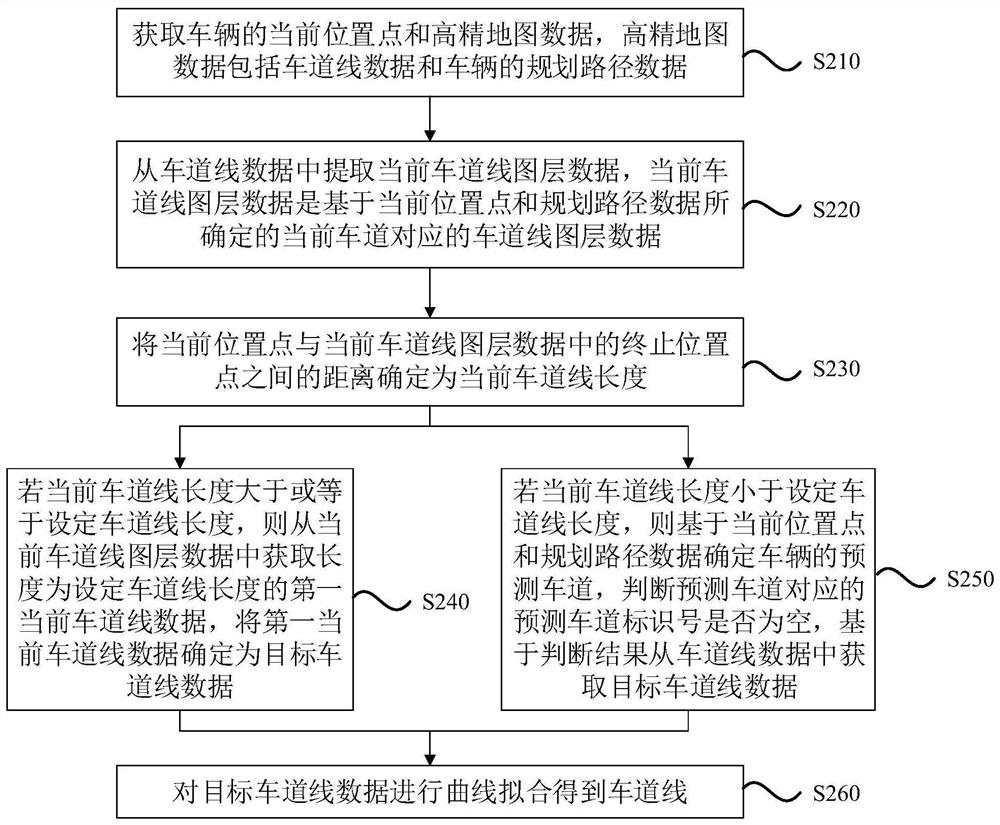
[0042] figure 2 This is a flowchart of a method for extracting a lane line in Embodiment 2 of the present invention. This embodiment is based on the above-mentioned embodiment. For step S120, based on the current position point and the planned path data, the lane line data is extracted from the lane line data. The target lane line data within the set lane line length in front of the lane where the vehicle is located is extracted and optimized.
[0043] like figure 2 As shown, the method of this embodiment specifically includes the following steps:
[0044] S210: Acquire the current position point of the vehicle and high-precision map data, where the high-precision map data includes lane line data and planned path data of the vehicle.
[0045] S220: Extract the current lane line layer data from the lane line data, where the current lane line layer data is the lane line layer data corresponding to the current lane determined based on the current position point and the planne...
Embodiment 3
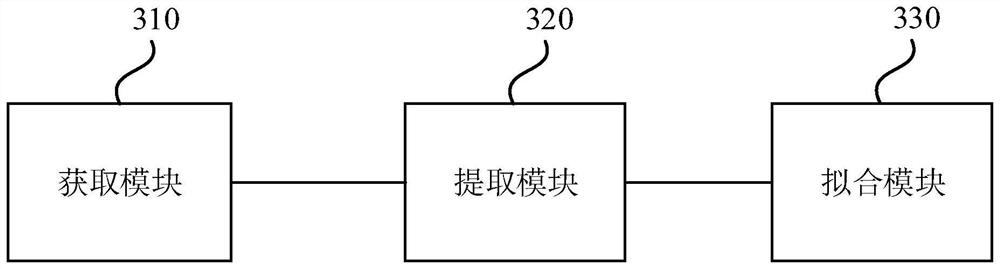
[0083] image 3 This is a schematic structural diagram of a lane line extraction device provided in Embodiment 3 of the present invention. This embodiment can be applied to the case of extracting lane lines based on high-precision maps, the device can be implemented in software and / or hardware, and the device can be integrated in a vehicle, such as image 3 As shown, the lane line extraction device specifically includes: an acquisition module 310 , an extraction module 320 and a fitting module 330 .
[0084] Wherein, the acquisition module 310 is used to acquire the current position point of the vehicle and high-precision map data, and the high-precision map data includes lane line data and planned path data of the vehicle;
[0085] An extraction module 320, configured to extract, from the lane line data of the high-precision map data, based on the current position point and the planned path data, target lane line data within a set lane line length in front of the lane where ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More