

Ship crane optimization control method based on automatic gain tuning
An optimized control and automatic gain technology, applied in the direction of load hanging components, transportation and packaging, etc., can solve problems such as less consideration of system optimization control problems, no consideration of input saturation and state constraints, and many parameters, etc., to achieve improved optimal control effect of effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
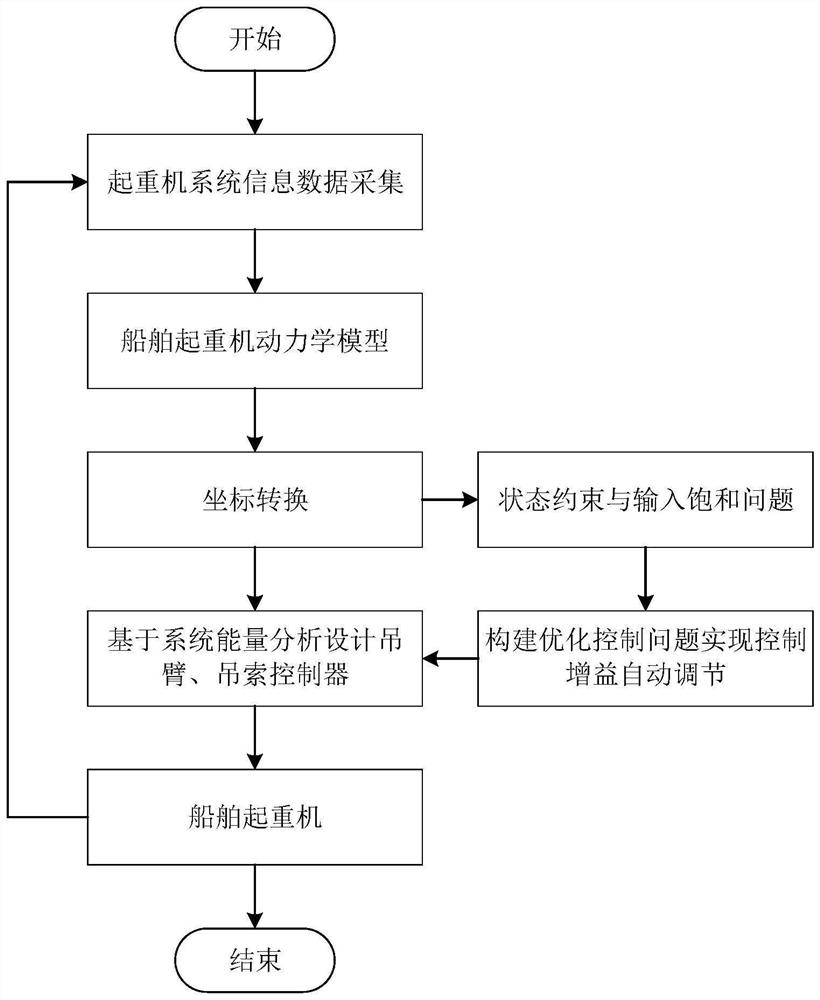
Method used
Image

Examples
Embodiment 1
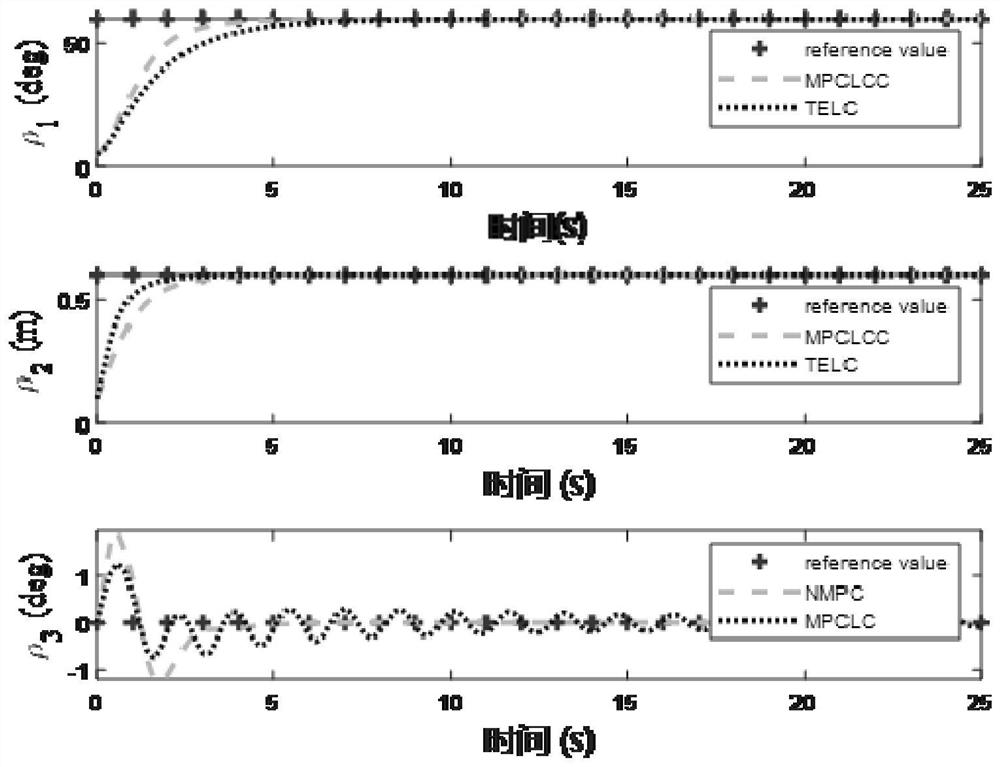
[0142] In this embodiment, the validity of the method of the present invention is verified through simulation and comparison with other methods. In this embodiment, the values of relevant parameters are as follows:
[0143] m B =10kg,m p =1.0kg,L B =0.9m, J=2.7kg·m 2 ,d=0.4m,g=9.8m / s 2 .
[0144] The initial value is ρ 1 (0)=5deg, ρ 2 (0)=0.10m, ρ 3 (0) = 0 deg.
[0145] The expected value is ρ 1d =60deg,ρ 2d =0.60m, ρ 3d = 0 degrees.
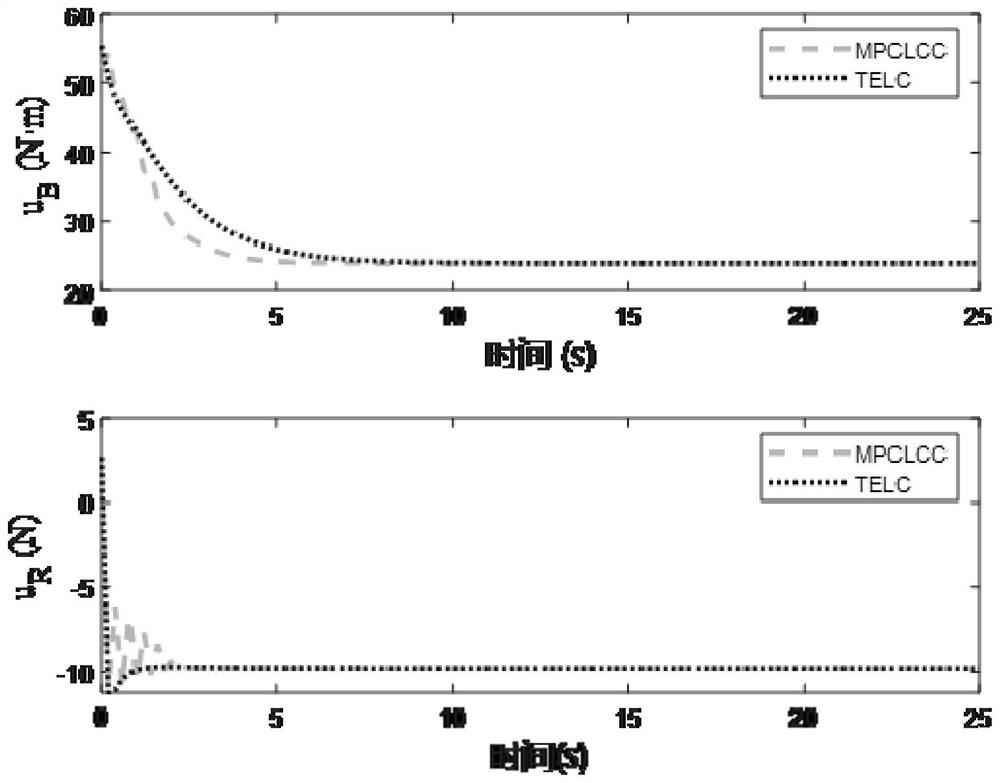
[0146] For the convenience of comparison, for the controller (abbreviated as TELC here), through trial and error, a more ideal control gain is obtained as k p1 =8.0,k p2 =15,k d1 =25,k d2 =15.
[0147] For the online gain adjustment controller based on model predictive control proposed by the present invention (abbreviated as MPCLCC here), the values of each weight matrix in the cost function (i.e. formula (a)) are respectively: Q=P=diag{10 4 10 4 10 4}, R={0.010.010.010.01}. The value ranges of the four control gains (...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More