

Blind zone obstacle emergency avoidance method and device based on vehicle-road cooperation
A vehicle-road coordination and emergency avoidance technology, applied in the direction of automatic starting devices, etc., can solve the problems of increased collision risk, uncertain changes, non-compliance with traffic rules and trajectories, etc., and achieves the effect of increasing safety and wide perception range.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] In order to make the content of the present invention more clearly understood, the present invention will be further described in detail below based on the specific embodiments and in conjunction with the accompanying drawings.
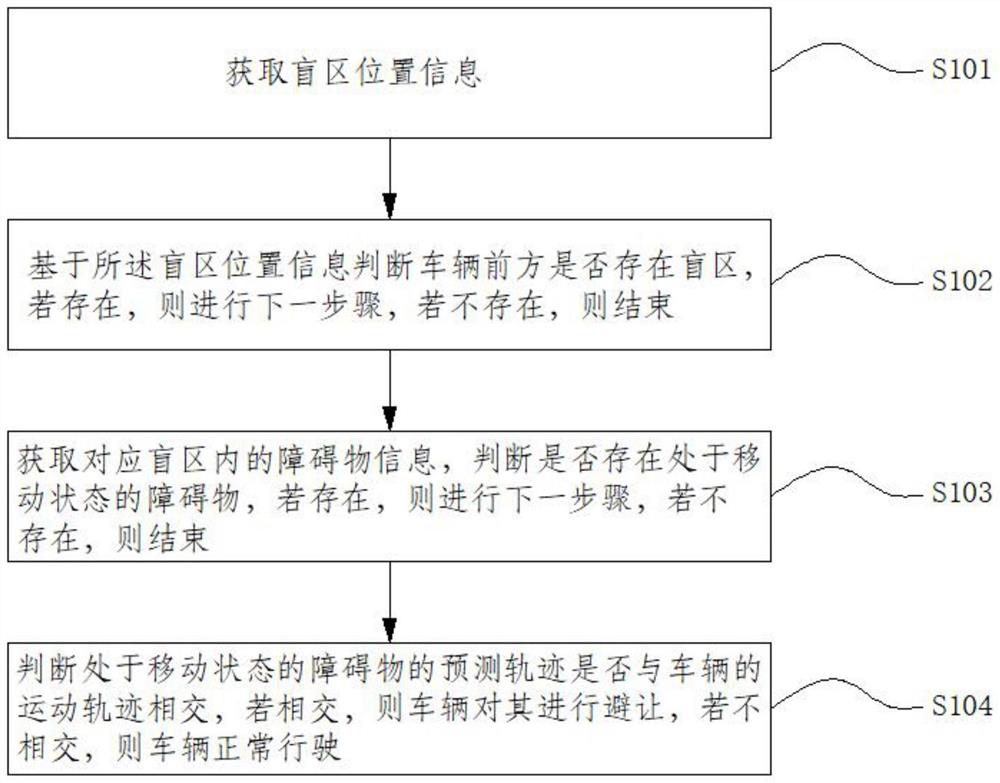
[0040] see figure 1 , this embodiment provides a method for emergency avoidance of obstacles in blind spots based on vehicle-road coordination, including steps S101 to S104, and the specific steps are described as follows:
[0041] Step S101: Obtain the location information of blind spots in the map.
[0042] Specifically, during the automatic driving process of the vehicle, especially on unstructured roads, obstacles such as trees and walls often appear. Due to the limitation of the height of the vehicle itself, the lidar and camera mounted on the body cannot detect blocked obstacles, resulting in blind spots. In this embodiment, the position of the blind spot has been marked on the map in advance, so the vehicle can obtain the position info...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More