Complete vehicle coordination control method and system
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A technology for coordinating the control system and the entire vehicle, which is applied to vehicle components, elastic suspensions, transportation and packaging, etc., and can solve problems such as failure to consider the coupling vibration of the entire vehicle suspension, and difficulty in achieving optimal control effects.
Pending Publication Date: 2022-06-17
彭志召
View PDF0 Cites 0 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
Most of the current control methods aim at the vertical control of the suspension of a single wheel, and completely independently control the four (or mor
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
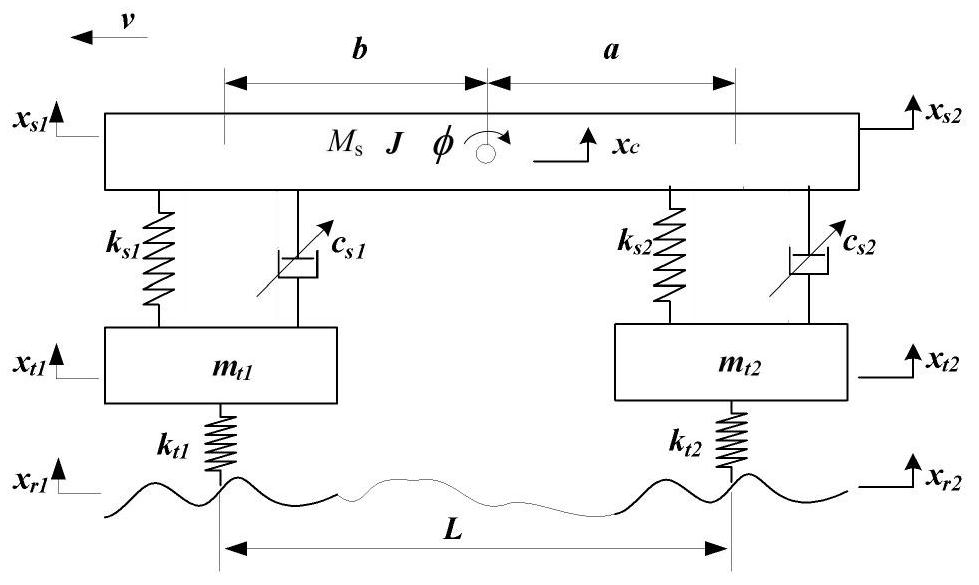
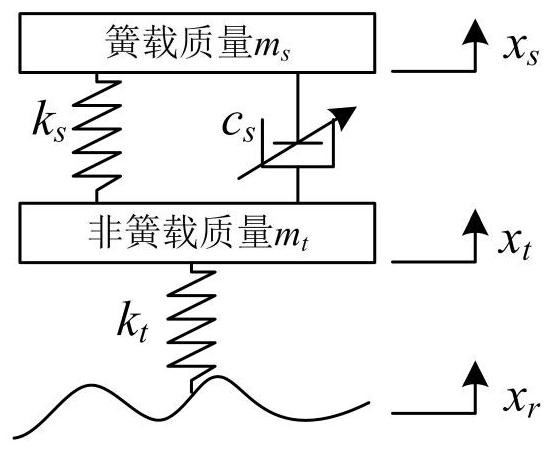
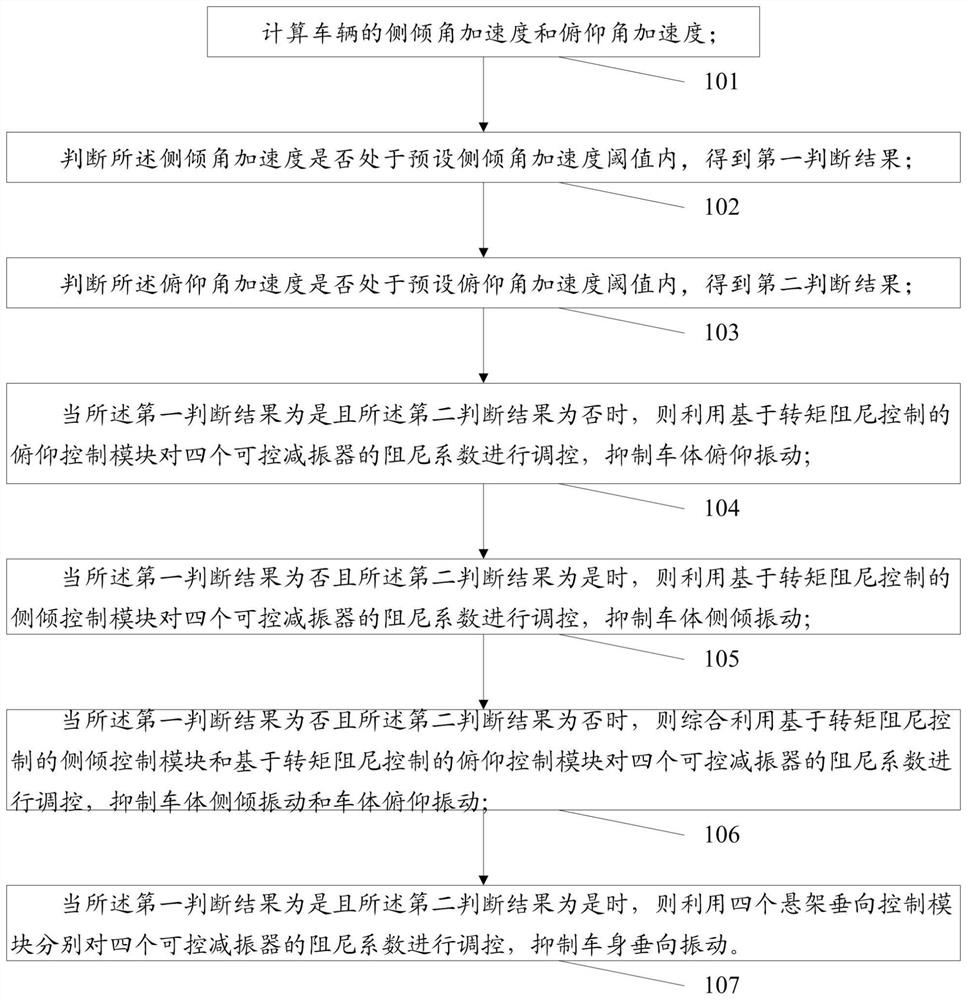
The invention relates to a vehicle coordination control method and system, and belongs to the technical field of vehicle control. Whether the coupled vibration of the whole vehicle needs to be considered and the type of the coupled vibration needing to be considered are judged by taking whether the roll angle acceleration is within the preset roll angle acceleration threshold value or not and whether the pitch angle acceleration is within the preset pitch angle acceleration threshold value or not as judgment references; when the pitch angle acceleration or the roll angle acceleration of the vehicle body is not within the set threshold value, the coupling quantity influence is large, and the pitch vibration and the roll vibration of the vehicle body are restrained through main control based on torque damping control. When the pitching angle acceleration and the roll angle acceleration of a vehicle body are within set threshold values, the influence of the coupling amount is ignored, the suspension of the whole vehicle is regarded as being composed of four independent sub-suspensions, and each sub-suspension independently implements vertical control, so that pitching, roll and vertical vibration of the vehicle during running are effectively restrained, coordinated control over the whole vehicle is achieved, and the service life of the whole vehicle is prolonged. The riding comfort of the vehicle is obviously improved, and the control effect is good.
Description
technical field [0001] The invention relates to the technical field of vehicle control, in particular to a vehicle-wide coordinated control method and system for vehicle suspension damping. Background technique [0002] The semi-active suspension of the vehicle can change the suspension damping in real time according to the vibration of the vehicle and the ups and downs of the road surface, thereby significantly improving the ride comfort and operating stability of the vehicle. It has the advantages of low control energy consumption, good robustness, and high cost performance. It is a hotspot of research and application in the field of vehicle engineering. Most of the current control methods aim at the vertical control of the suspension of a single wheel, and completely independently control the four (or more) sub-suspensions of the vehicle, without considering the coupling vibration of the vehicle suspension, the control effect Difficult to achieve the best. Contents of ...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More