Automatic obstacle avoidance device based on artificial intelligence
An automatic obstacle avoidance and artificial intelligence technology, applied in two-dimensional position/channel control, power management, electric vehicles, etc., can solve problems such as low safety, poor device stability, and high difficulty in obstacle avoidance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
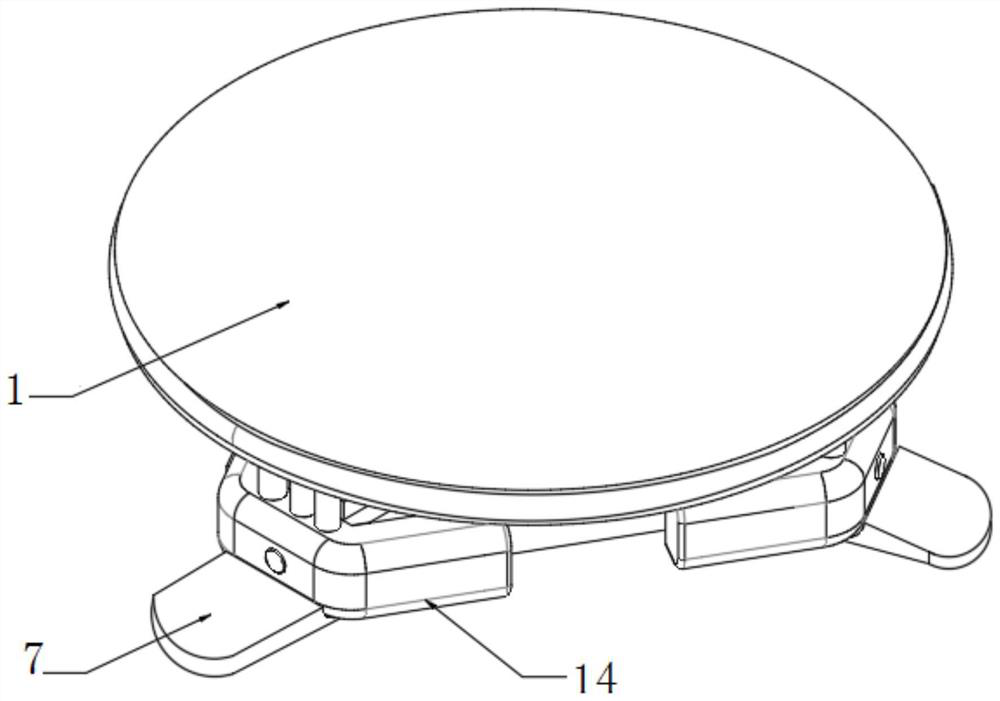
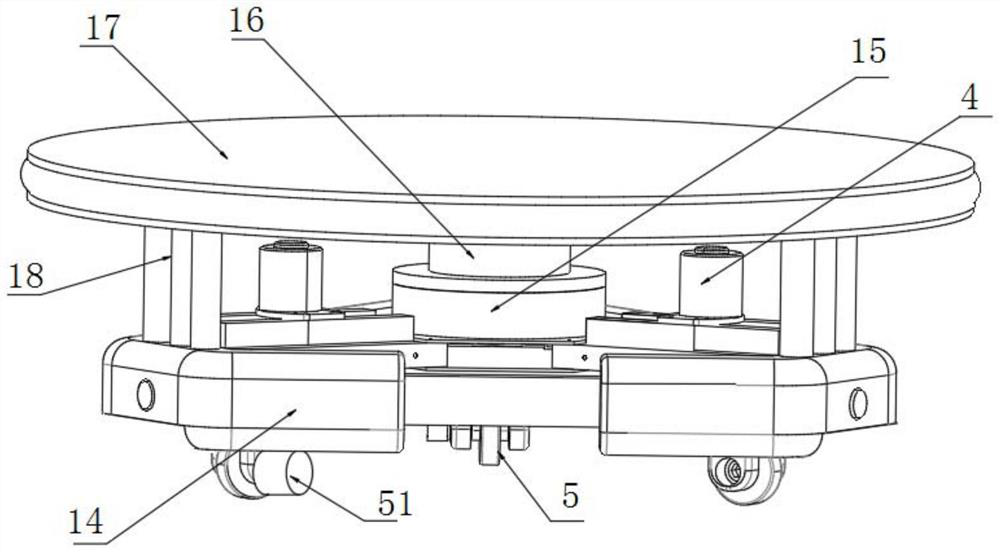
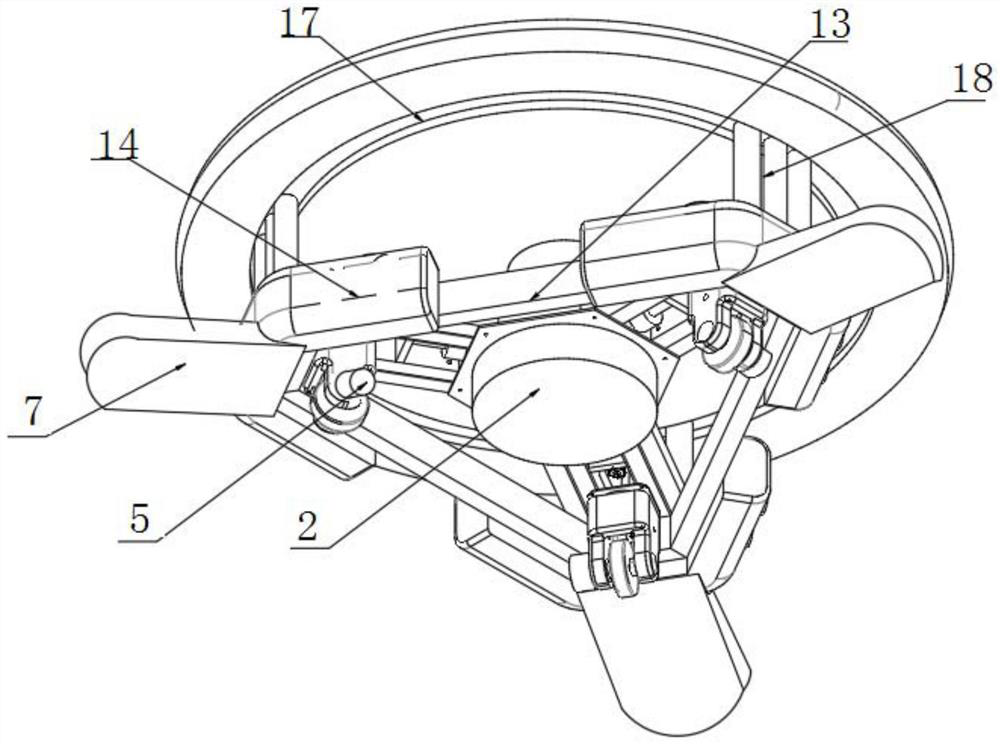
[0045] An artificial intelligence-based automatic obstacle avoidance device provided by an embodiment of the present invention, such as Figure 1 to Figure 7 As shown, in this embodiment, it includes a base 1, a main control module 2 fixed on the base 1, an environment acquisition module 3, and multiple groups of one-to-one corresponding steering drive modules 4 and displacement drive modules 5; steering drive The module 4 includes a first power assembly 41 and a second power assembly 42, the first power assembly 41 is geared to the second power assembly 42; the displacement drive module 5 includes a third power assembly 51 and a traveling wheel 52; the traveling wheel 52 is connected with the second power assembly 42. 42 shaft connection of power assembly;
[0046] The environment collection module 3 is used to obtain the surrounding environment information and feed it back to the main control module 2;
[0047] In this embodiment, the environment acquisition module 3 includ...
Embodiment 2
[0078] In this example, see Figure 9 , Figure 10 The difference between this embodiment and Embodiment 1 is that the load-bearing plate 17 is provided with an internal cavity, the arcuate side of the load-bearing plate 17 is provided with an annular groove, and the internal cavity is communicated with the annular groove through a slot hole.
[0079] In this embodiment, the present invention also includes a safety protection component 6 (not marked in the figure), the safety protection component 6 includes a control computer 61, a gas generating device 62, and an airbag 63, and the control computer 61 and the gas generating device 62 are installed with load-bearing plates 17; the airbag 63 is installed in the annular groove in a surrounding manner, and the airbag 63 is connected with the gas generating device 62 through a hose;
[0080] When the control computer 61 detects a violent collision, the control gas generating device 62 is activated to inflate the airbag 63 for col...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com