

Autonomous obstacle avoidance and navigation method for unmanned aerial vehicle-based field search and rescue
A navigation method and unmanned aerial vehicle technology, applied in the direction of target search control, radio wave measurement system, satellite radio beacon positioning system, etc., can solve the problem of inability to obtain obstacle information, inability to detect tree branches, long and thin wire obstacles, Unable to detect moving obstacles and other problems, to achieve the effect of ensuring accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0059] The invention provides an autonomous obstacle avoidance and navigation method for unmanned aerial vehicle search and rescue in the wild. In order to make the purpose, technical solutions and effects of the present invention more clear and definite, the present invention will be further described in detail below with reference to the accompanying drawings.
[0060] The invention mainly includes two parts, global search based on GPS signal navigation and autonomous obstacle avoidance and navigation in the process of approaching the target. The autonomous obstacle avoidance and navigation method for unmanned aerial vehicle field search and rescue mainly includes the following steps:
[0061] Step S100: Under the navigation of the GPS signal, the UAV searches according to a preset path.
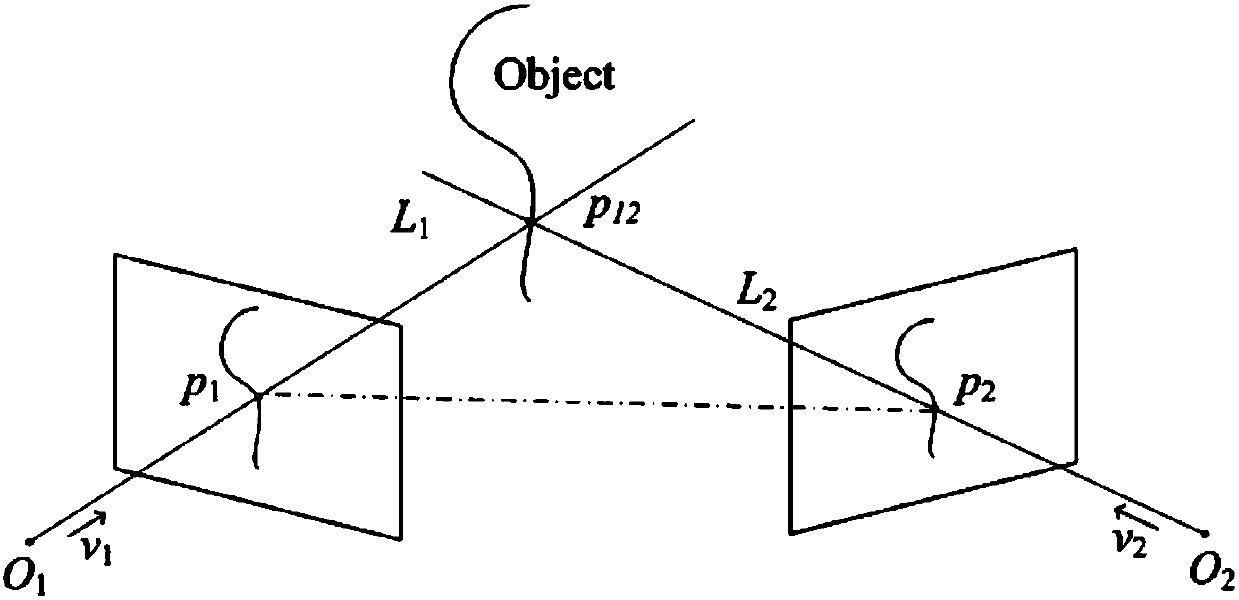
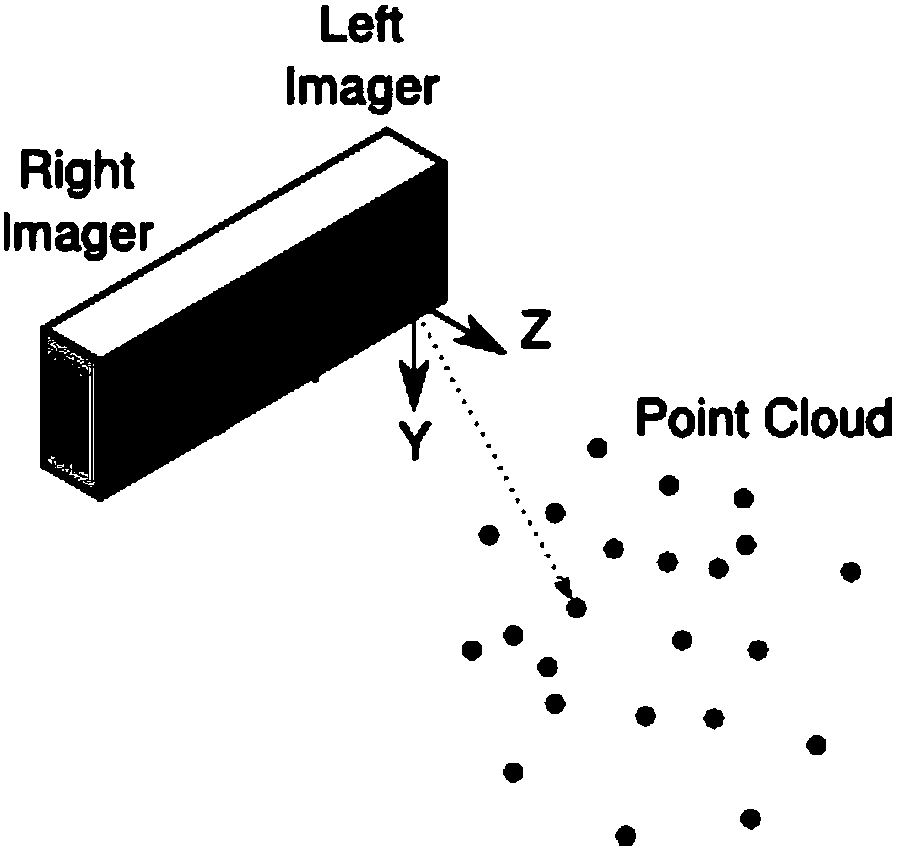
[0062] Step S200: After the UAV finds the target, it realizes autonomous obstacle avoidance and navigation through an algorithm based on binocular vision and ultrasonic waves, thereby app...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More