

Stepless lifting type six dimension force sensor caliberating device
A six-dimensional force sensor and calibration device technology, which is applied in the field of generalized force loading, can solve the problems of inaccurate calibration of multi-dimensional force sensors in each direction, inapplicability of generalized loading and calibration of large-scale sensors, and unsystematic problems.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
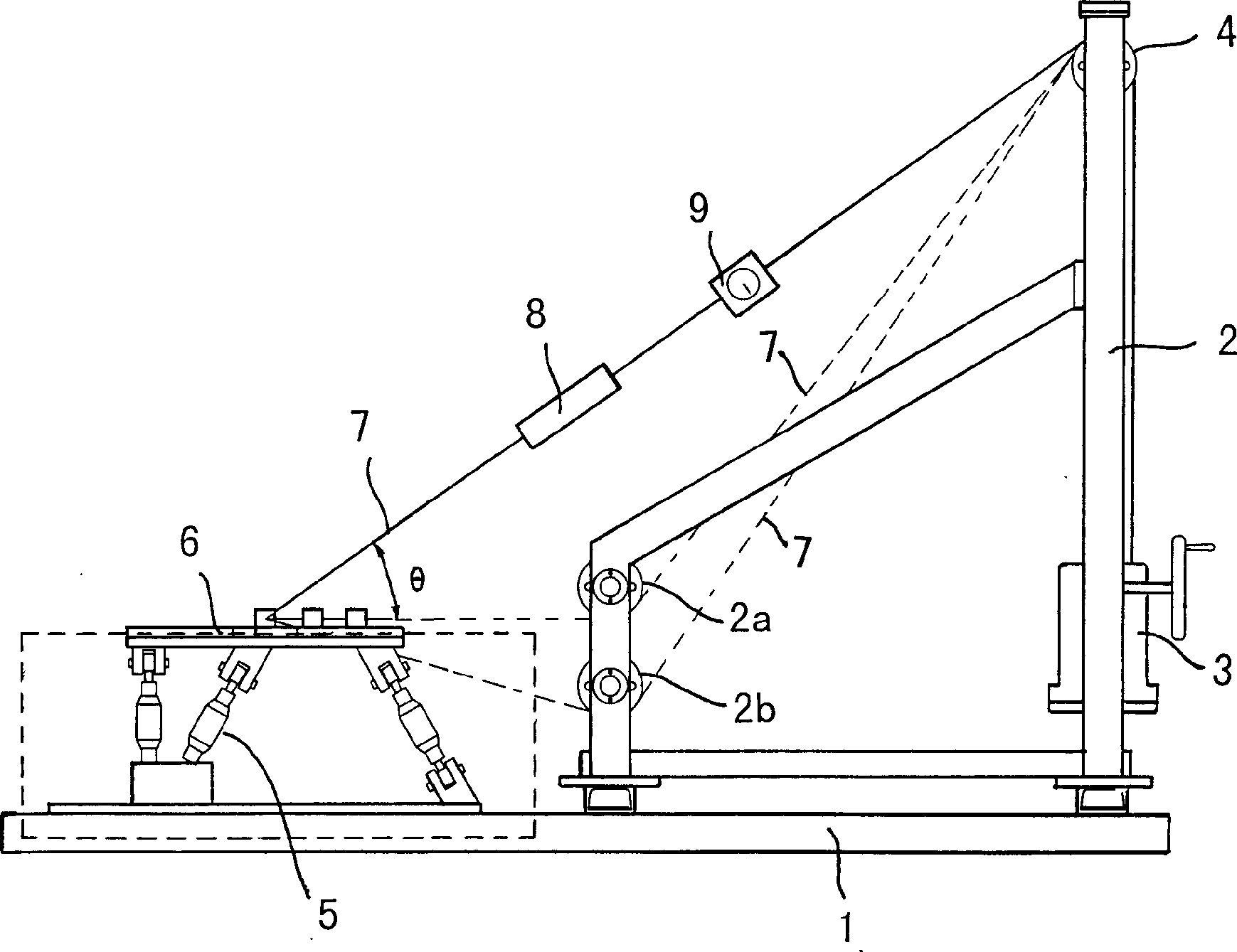
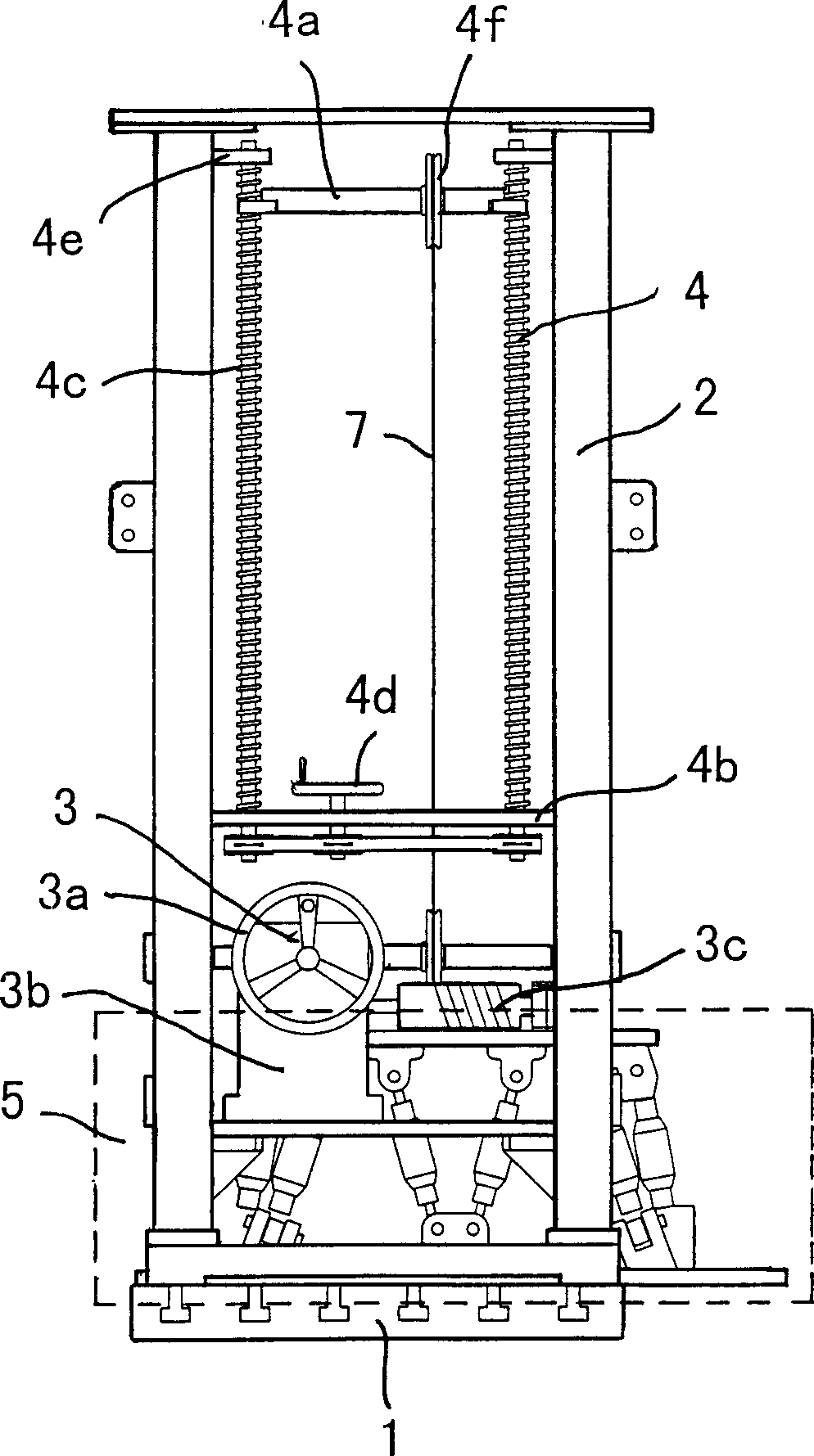
[0010] The working principle of the present invention: the main function of the stepless lifting six-dimensional force sensor calibration device is to provide standard generalized loading, and use the standard generalized load to calibrate the static performance indicators of the six-dimensional force sensor. The lifting pulley is moved to a certain position and fixed by the pulley stepless lifting mechanism 4, and then the loading is started, and the output torque M is generated through the manual loading reducer 3, and the loading rope 7 is wound on the reel of the reducer 3, thereby generating a rope The tension K of the tension force K is proportional to the input torque of the hand crank, and its magnitude is detected by the standard tension sensor 8; the loading rope 7 changes the loading direction through the upper pulley and the lower pulley on the support frame 2, and the loading rope 7 The angle θ with the horizontal plane is detected by the inclination sensor 9; by c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More