

Device for producing shape model
A shape model and generation device technology, applied in the field of visual recognition, can solve the problems of reduced production efficiency and considerable time spent
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] Hereinafter, embodiments of the present invention will be described in detail with reference to the drawings. In the drawings, common reference signs are attached to the same or similar components.
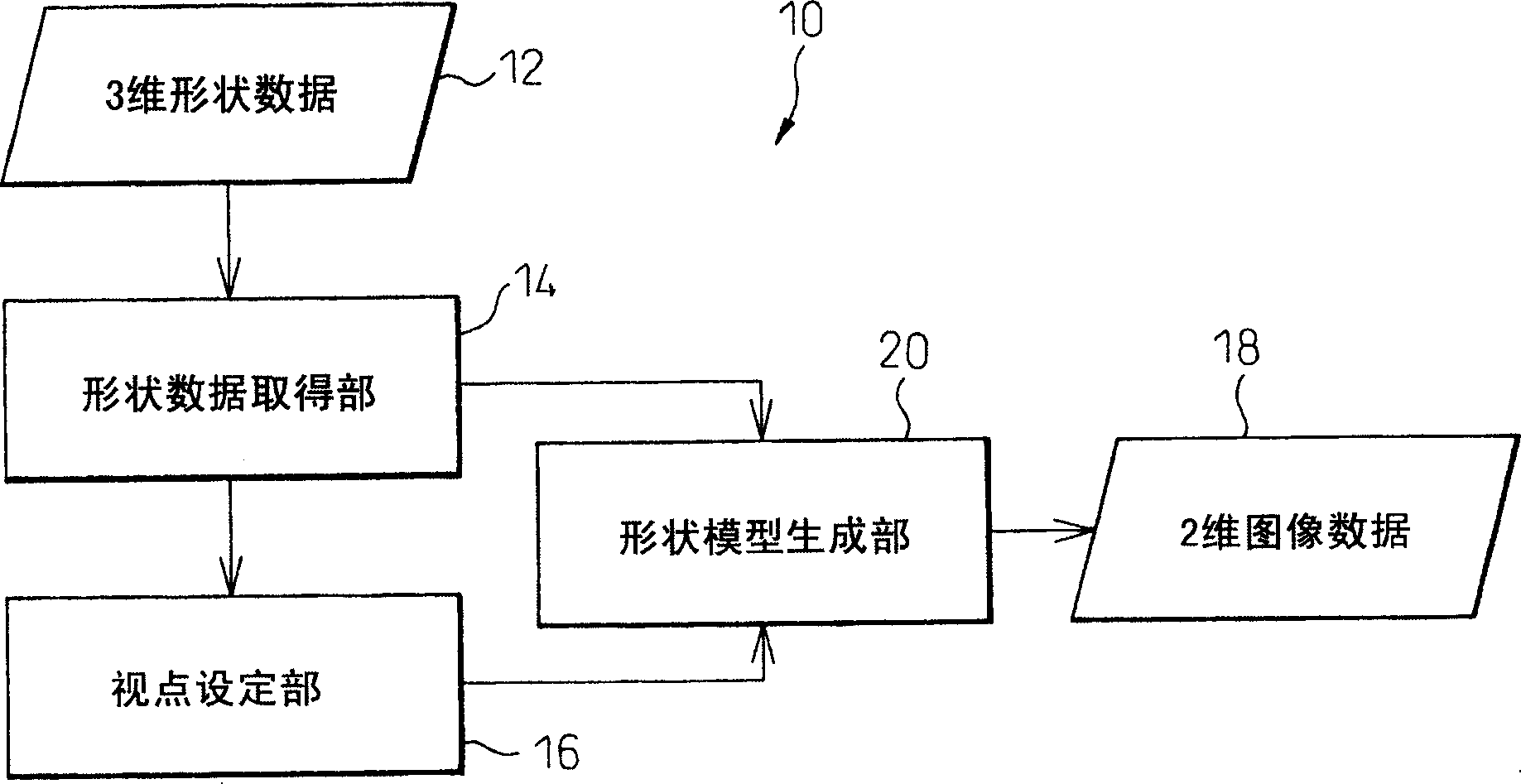
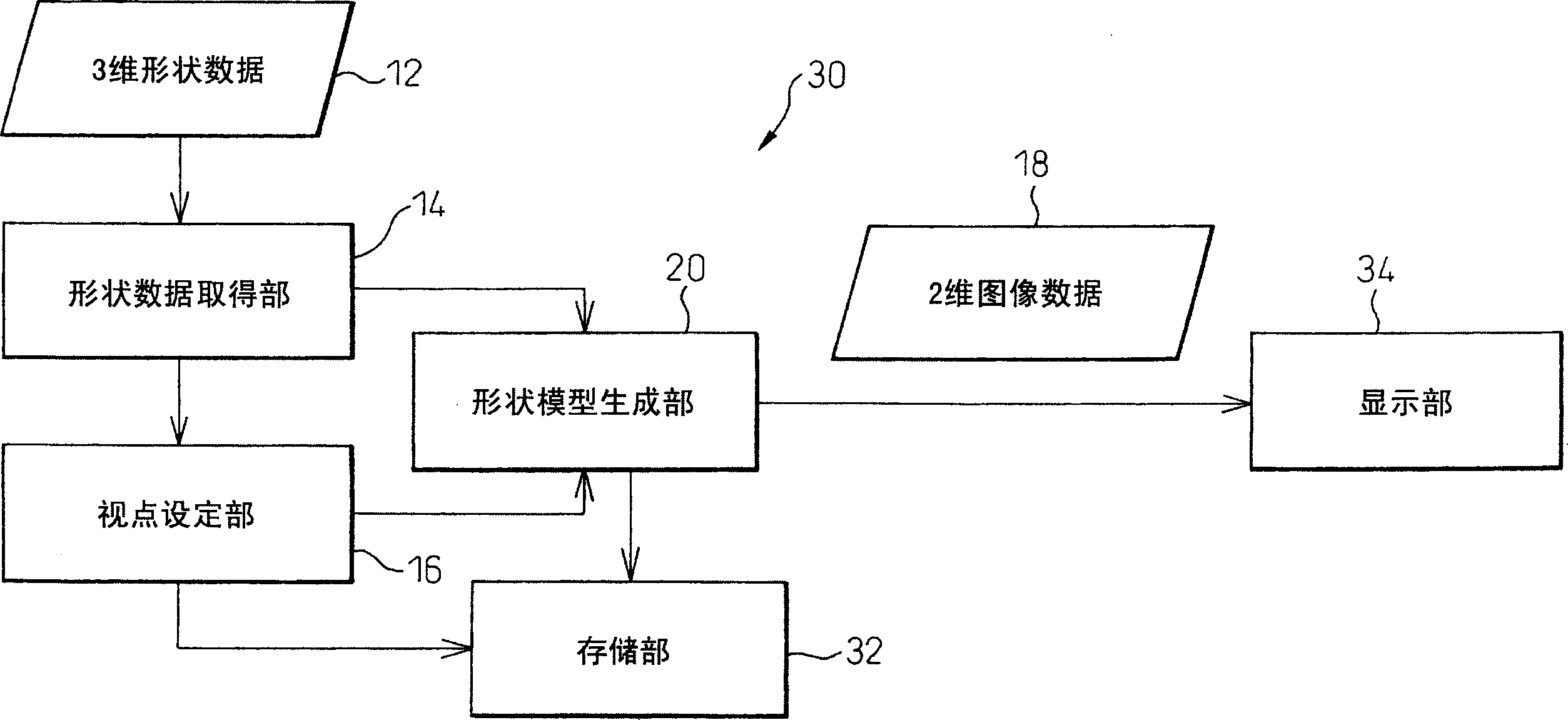
[0021] With reference to the accompanying drawings, figure 1 It is a block diagram showing the basic configuration of the shape model generation device 10 according to the present invention. The shape model generation device 10 is configured to include: a shape data acquisition unit 14 that acquires 3D shape data 12 of an object to be worked (not shown); In the coordinate system to which it belongs, a plurality of hypothetical viewpoints (not shown) that can observe an object placed at an arbitrary position in the coordinate system from mutually different directions are set; and the shape model generation unit 20 sets A plurality of hypothetical viewpoints set by the determination unit 16, when the object is observed on the above-mentioned coordinate system, a plurality ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More