

Non-oriented multi-position and high-precision calibrating method for inertial measuring unit
A technology of an inertial measurement unit and a calibration method, which is applied in the testing/calibration of measurement devices, speed/acceleration/shock measurement equipment, and speed/acceleration/shock measurement, etc., and can solve problems such as reducing calibration efficiency and complex process.
Inactive Publication Date: 2007-09-05
BEIHANG UNIV
View PDF0 Cites 18 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Usually, theodolite and other high-precision measuring instruments are used to realize the precise orientation of the inertial measurement unit. This process is very complicated, which further reduces the efficiency of calibration.
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
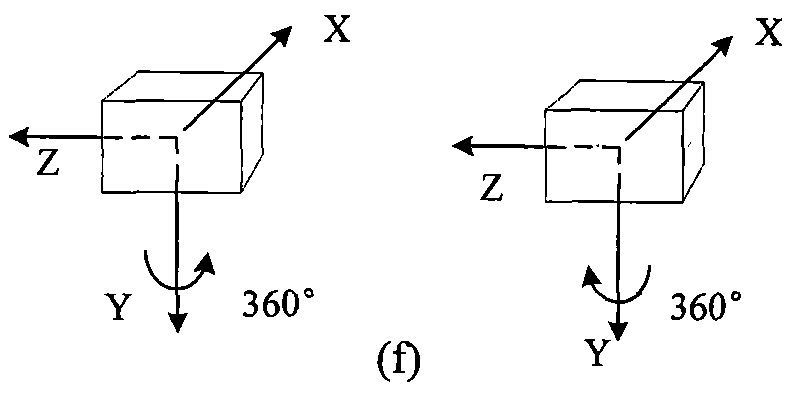
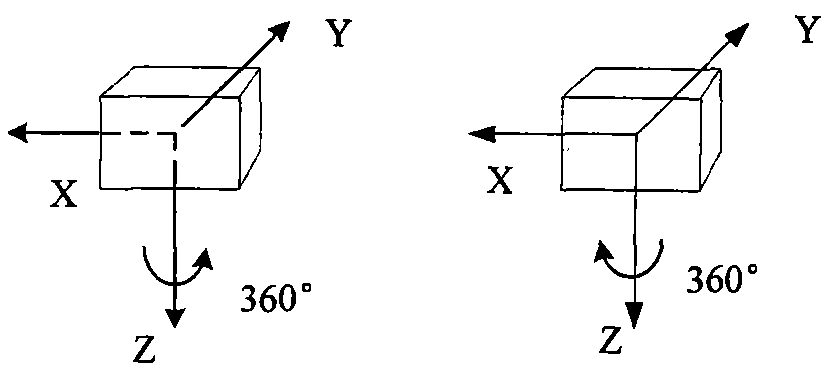
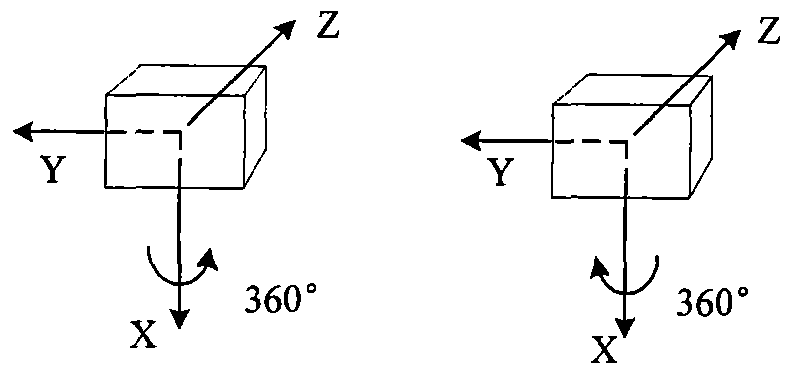
An astatic multi-position high-accuracy calibrating method of inertia measurement unit can accurately calibrate out 33 error coefficients in 7 types such as gyroscope scale factor gyroscope erection error, accelerometer scale error, etc by making IMU rotate at six position with 12 times of rotation under condition that accurate rotary platform is not pointed at north.
Description
technical field The invention relates to a method for accurately calibrating the error coefficient of an inertial measurement unit (Inertial Measurement Unit, IMU) by using a precision turntable, which can be used for calibrating a flexible gyro IMU, a liquid floating gyro IMU, or a MEMS gyro IMU. Background technique Strapdown Inertial Navigation System (SINS) is a precision instrument for measuring the position, velocity and attitude of a moving carrier. The advantages of simplicity, low cost, and high reliability have become the main development direction of inertial navigation technology. Inertial Measurement Unit (IMU) is composed of gyroscope, accelerometer and related circuits. It is the core of strapdown inertial navigation system. Its error includes two parts: deterministic error and random error. The deterministic error is the system error of about Accounting for about 90% of the total error, it is the main error source of the SINS. Therefore, before using the S...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityApplications(China)
IPC IPC(8): G01P21/00G01P15/14G01C25/00
CPCG01C25/005
Inventor房建成刘百奇张钰张海鹏杨胜高翌春
OwnerBEIHANG UNIV