

Method for calibrating industry robot
A technology of industrial robot and calibration method, which is applied in the field of calibration of industrial robots and can solve the problem of insufficient positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0016] The specific implementation of the calibration method of a kind of industrial robot of the present invention is described below, and it comprises the following steps:
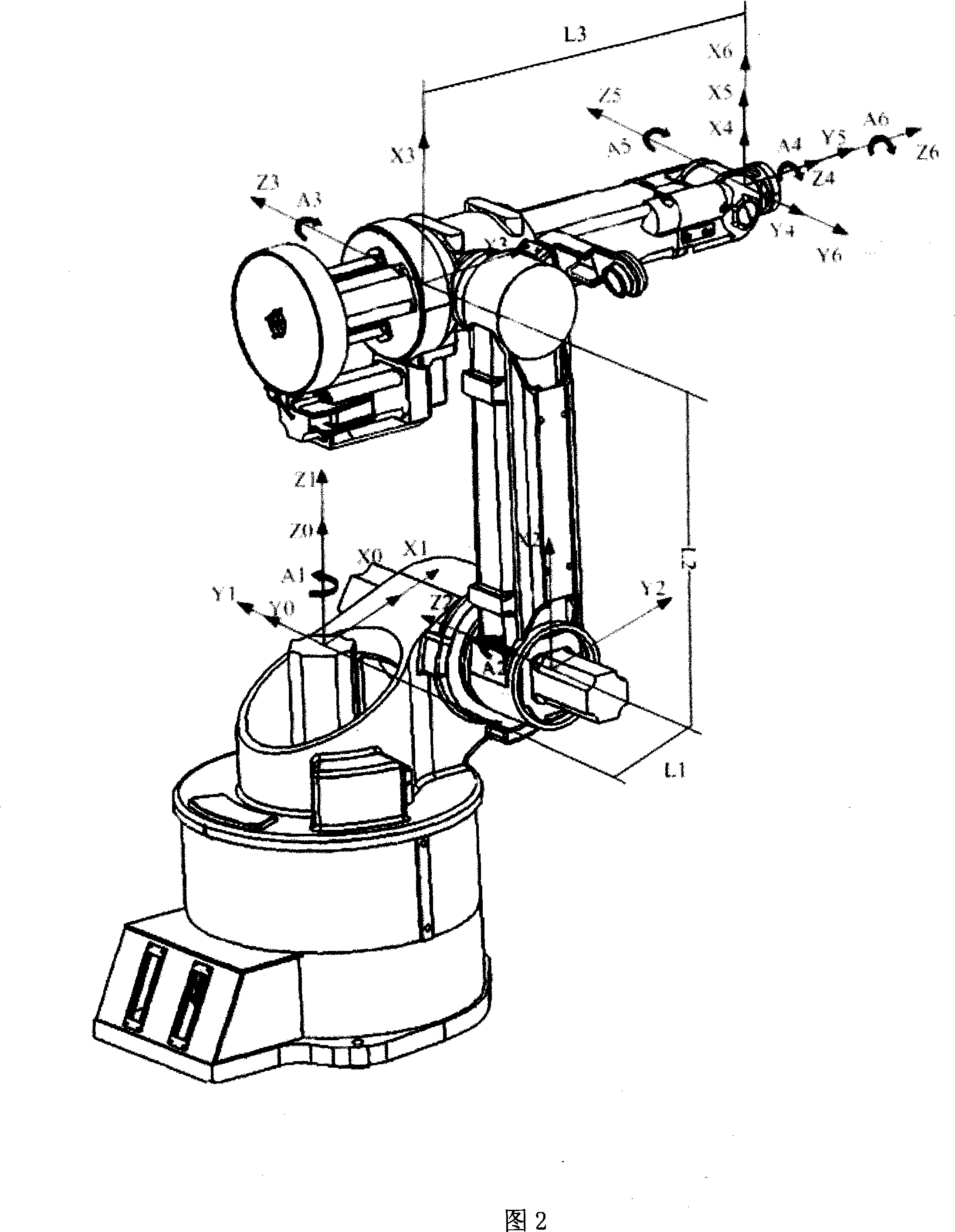
[0017] (a) In the Cartesian coordinate system, establish the kinematics model of the robot, and obtain the pose transformation matrix of the coordinate system of the end effector of the robot relative to the base coordinate system.
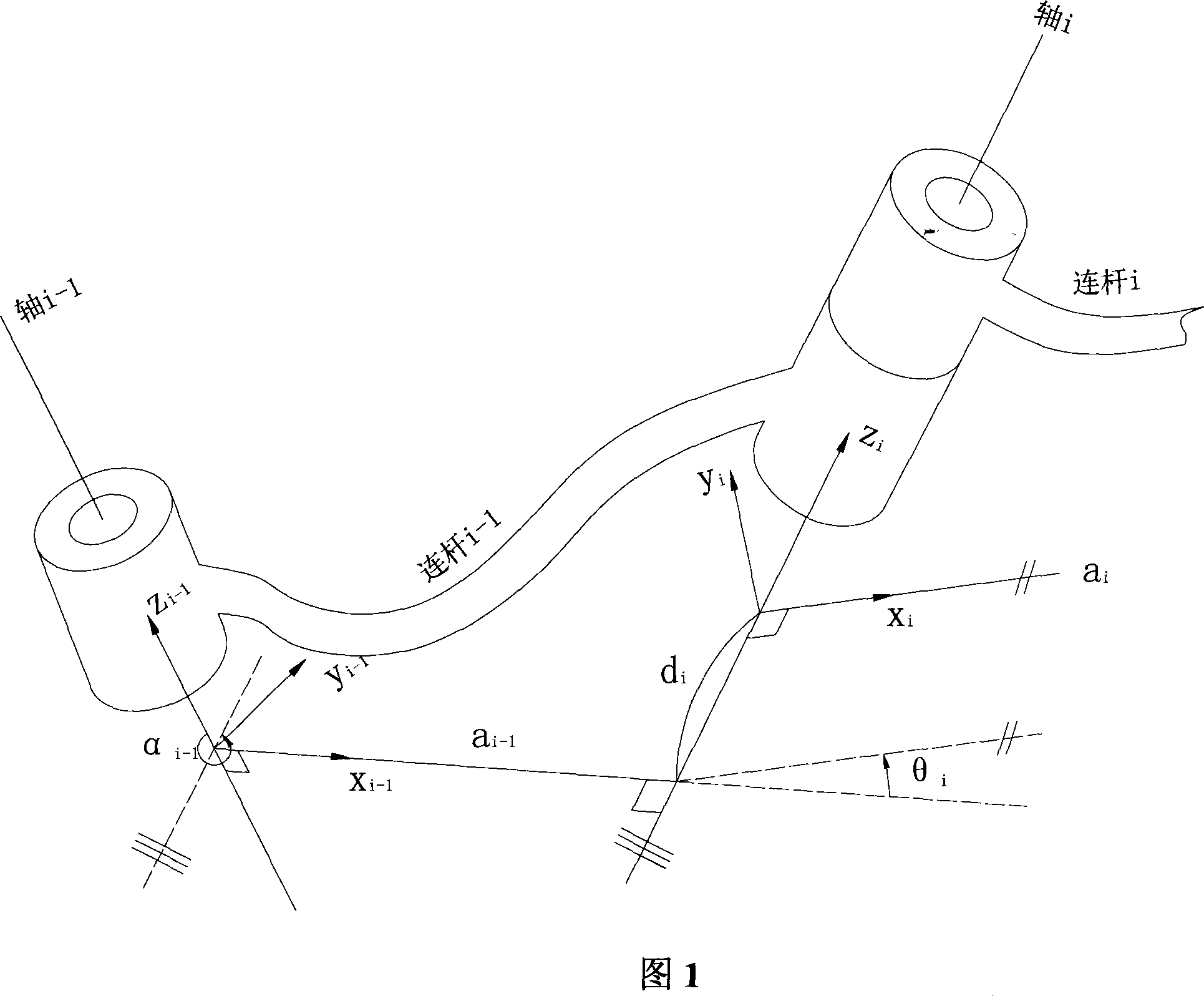
[0018] Selecting the kinematic model of the robot is a key process of calibration, because the kinematic model is an important factor that determines the various accuracy of the robot. The most basic and most general kinematics model of a robot is the Denavit-Hartenberg (D-H for short) model. In this model, the relationship between adjacent joints can be expressed by 4 independent D-H parameters, one of which is the joint variable θ i , and the other three are member structural parameter constants d i 、a i 、α i (See the definition of the 4 parameters later).
[0019] De...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More