Friendly walking-aid robot
A walking-assisting robot and friendly technology, which can be applied in the direction of walking aids, manipulators, physical therapy, etc. It can solve the problems of safety and use effects that are difficult to meet the requirements of the elderly, lack of product types, and few types of walking aids. , to achieve the effect of saving nursing staff, eliminating inner pain and low manufacturing cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
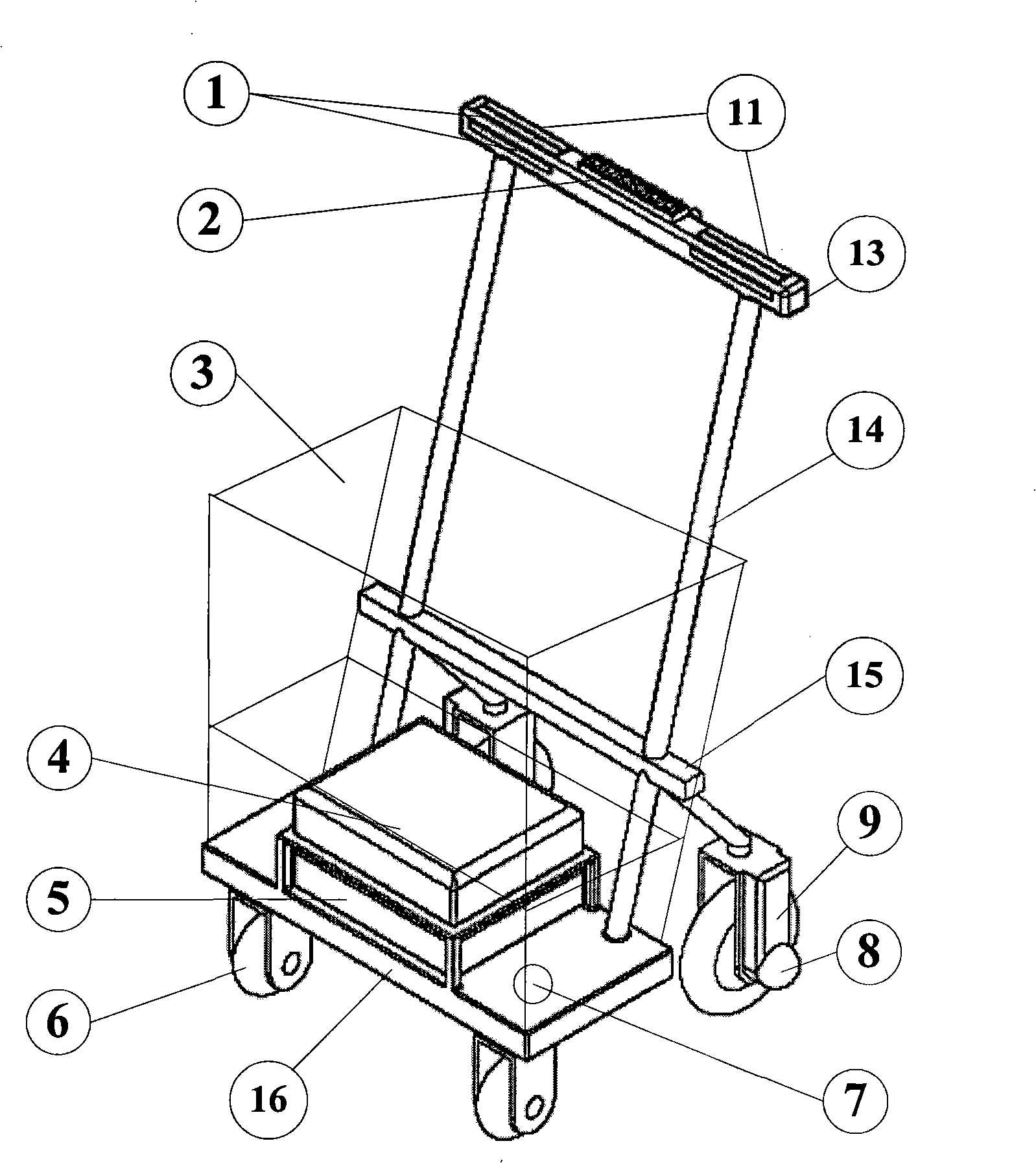
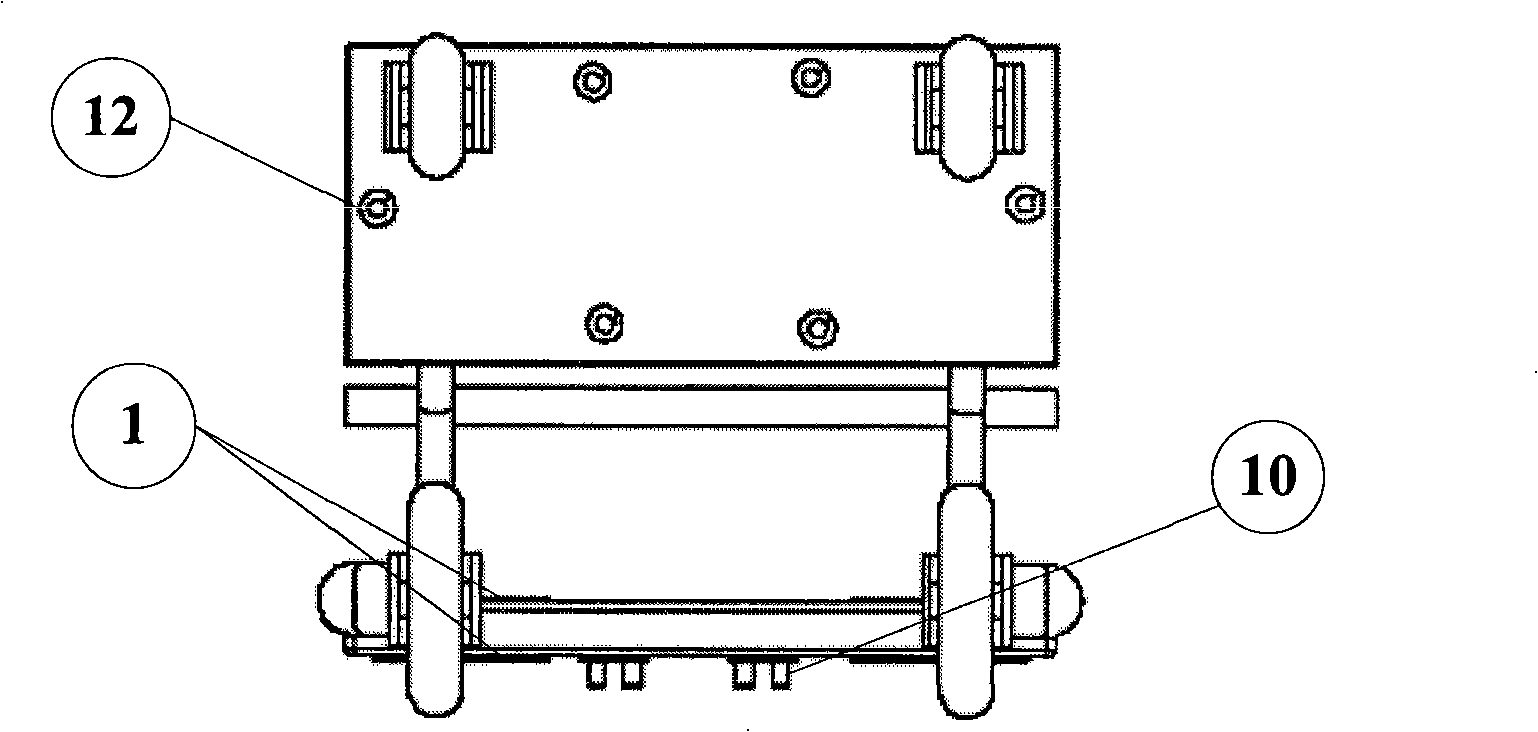
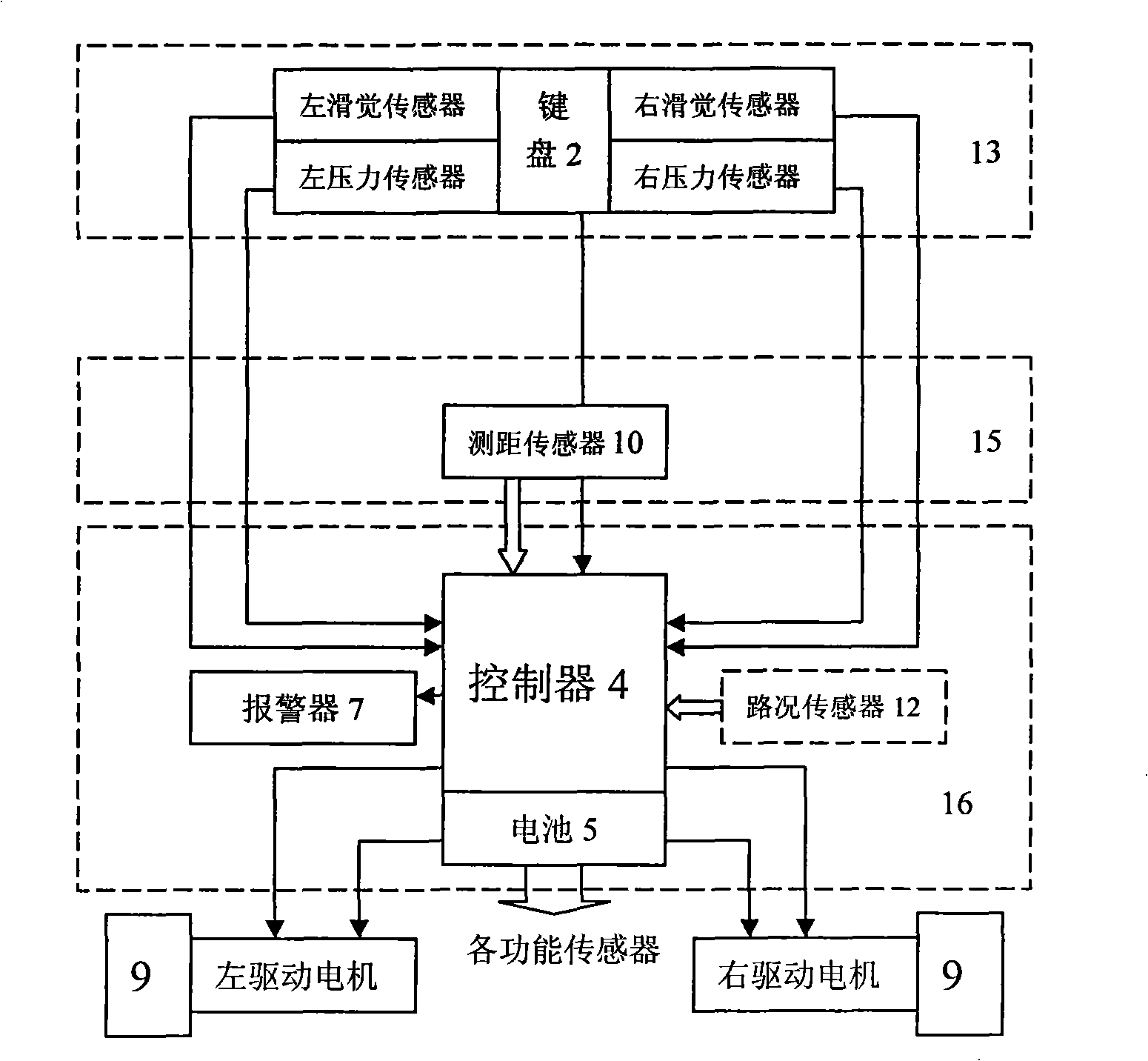
[0020] Such as Figure 1 to Figure 3 As shown, the robot of the present invention is composed of a controller 4, a battery 5, a sensor, a handrail 13, a keyboard 2, a drive wheel 9, a universal wheel 6, a drive motor 8, etc., wherein the sensor includes a pressure sensor 11, a slip sensor 1 , distance measuring sensor 10 and road condition sensor 12. The pressure sensor 11 measures the pressure of the upper hand on the armrest bar 13 to the robot, and the slip sensor 1 measures the relative motion between the hand of the elderly and the armrest of the robot. After the slip signal and pressure signal are collected by the corresponding sensors, they enter the controller for feature extraction and discrimination. The discrimination results are the movement tendency and fall tendency of the elderly. According to the result of the discri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com