

Robot odor source searching method based on odor actual measurement
A search method and robot technology, applied in the field of hexagonal paths where robots rely on active olfactory search for targets, to achieve the effects of improving odor tracking performance, expanding odor discovery functions, and wide application prospects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
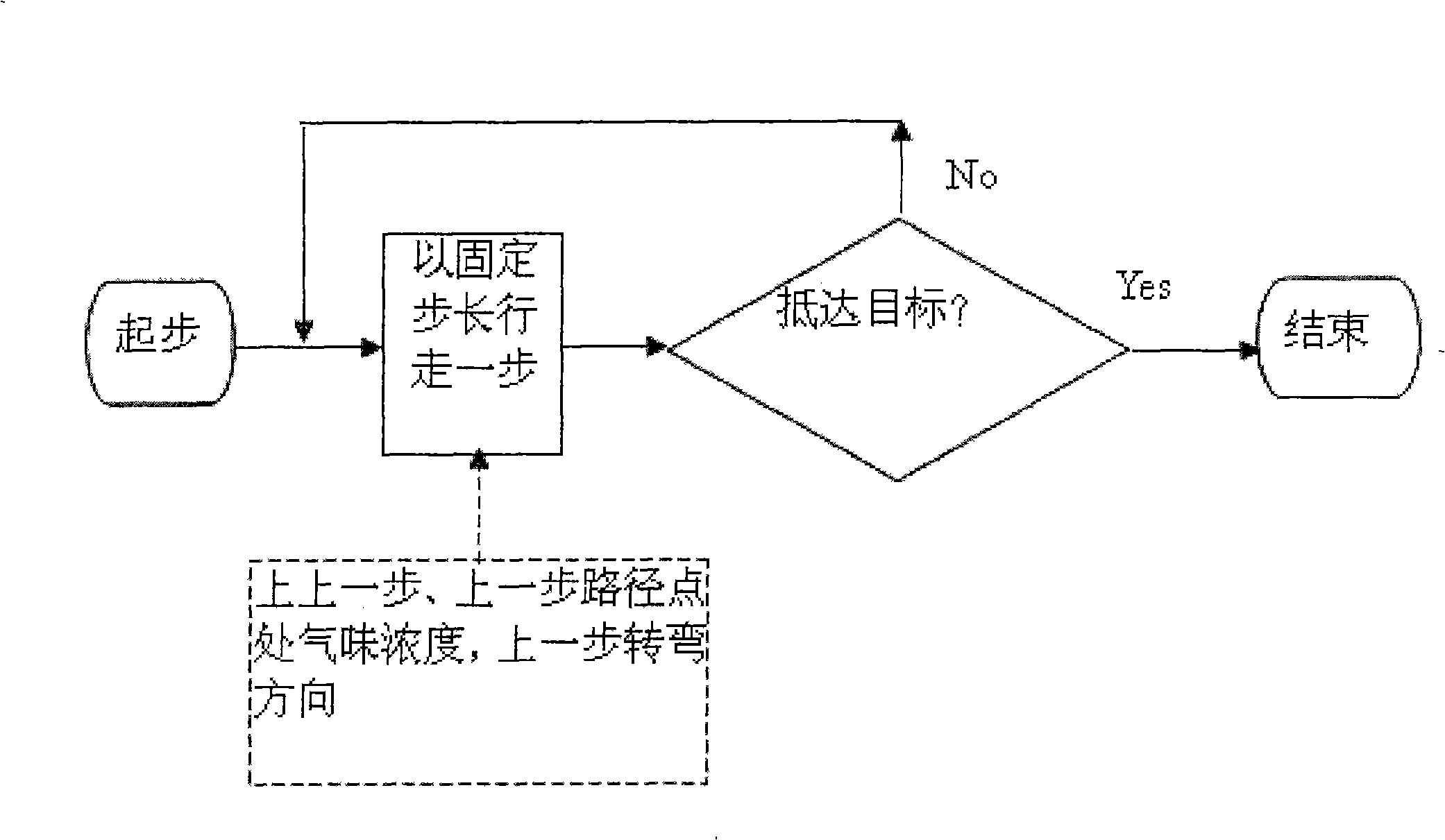
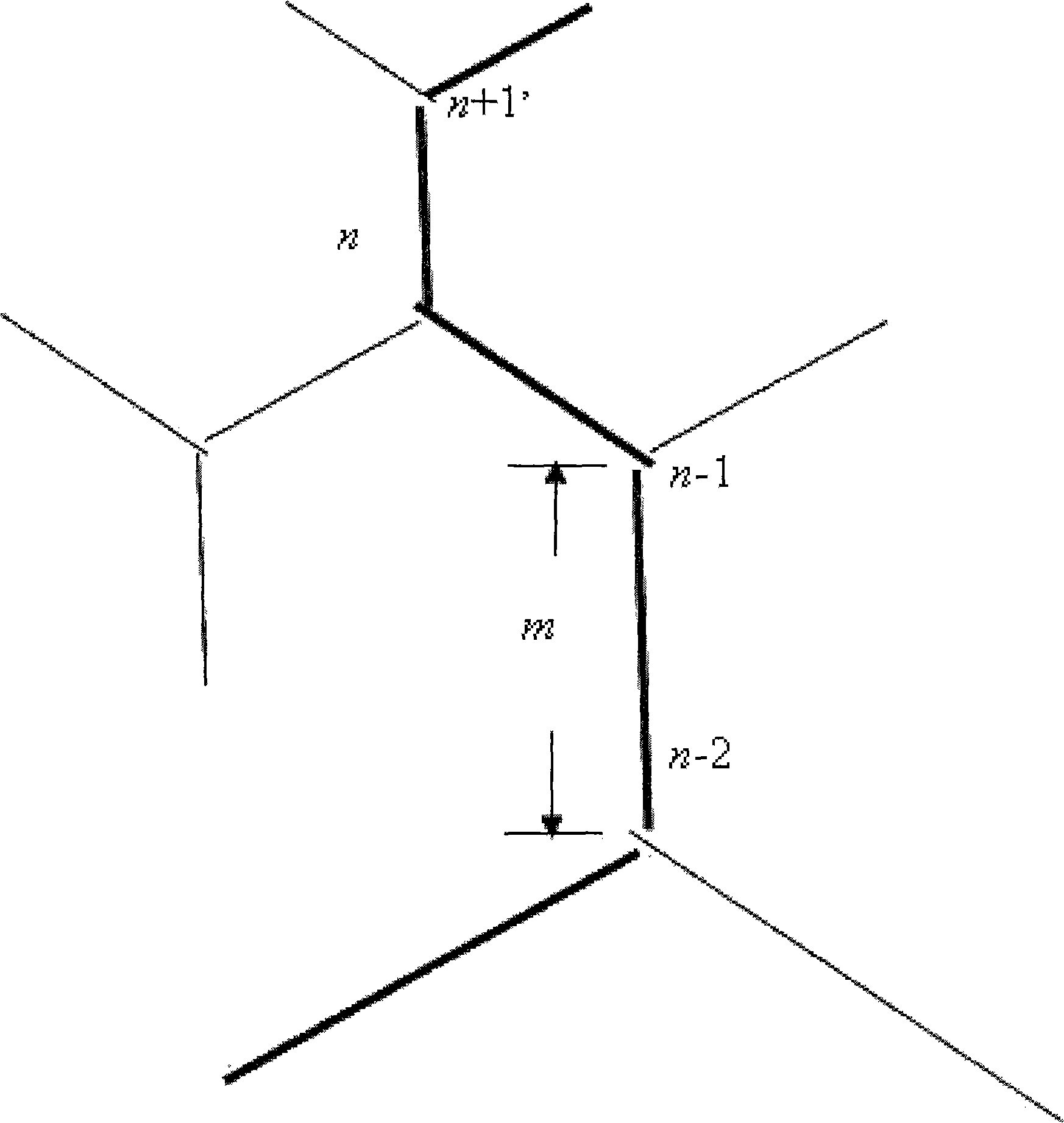
[0055] Such as image 3 And Fig. 4, this robot smell source search method based on smell actual measurement is carried out in the following specific steps:
[0056] 1. In the phase of smell discovery, the robot uses the gas sensor to detect the smell to be searched; according to the difference in the concentration of the smell detected by the robot in different directions, it initially judges the direction of the smell source and starts to walk.
[0057] 2. In the initial stage, the robot continues to walk for 6 steps in a hexagonal path pattern while detecting the concentration of the odor.
[0058] 3. In the odor tracking stage, adjust the step length according to the measured odor concentration and judge the degree of odor regression, and continue walking in a hexagonal path pattern.
[0059] 4. In the stage of odor source location, the robot adjusts the step length with a fixed step length change rate, and continues to walk in a hexagonal path pattern.
[0060] Since the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More