

Tendon rope parallel skillful under-driven bionic robot finger device
A robot hand, underactuated technology, applied in the field of anthropomorphic robots, can solve the problems of affecting the grasping effect, few degrees of freedom of joints, unable to meet the needs of grasping objects of different sizes, etc., achieving compact structure, reducing requirements, and improving anthropomorphism. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0076] The content of the specific structure and working principle of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
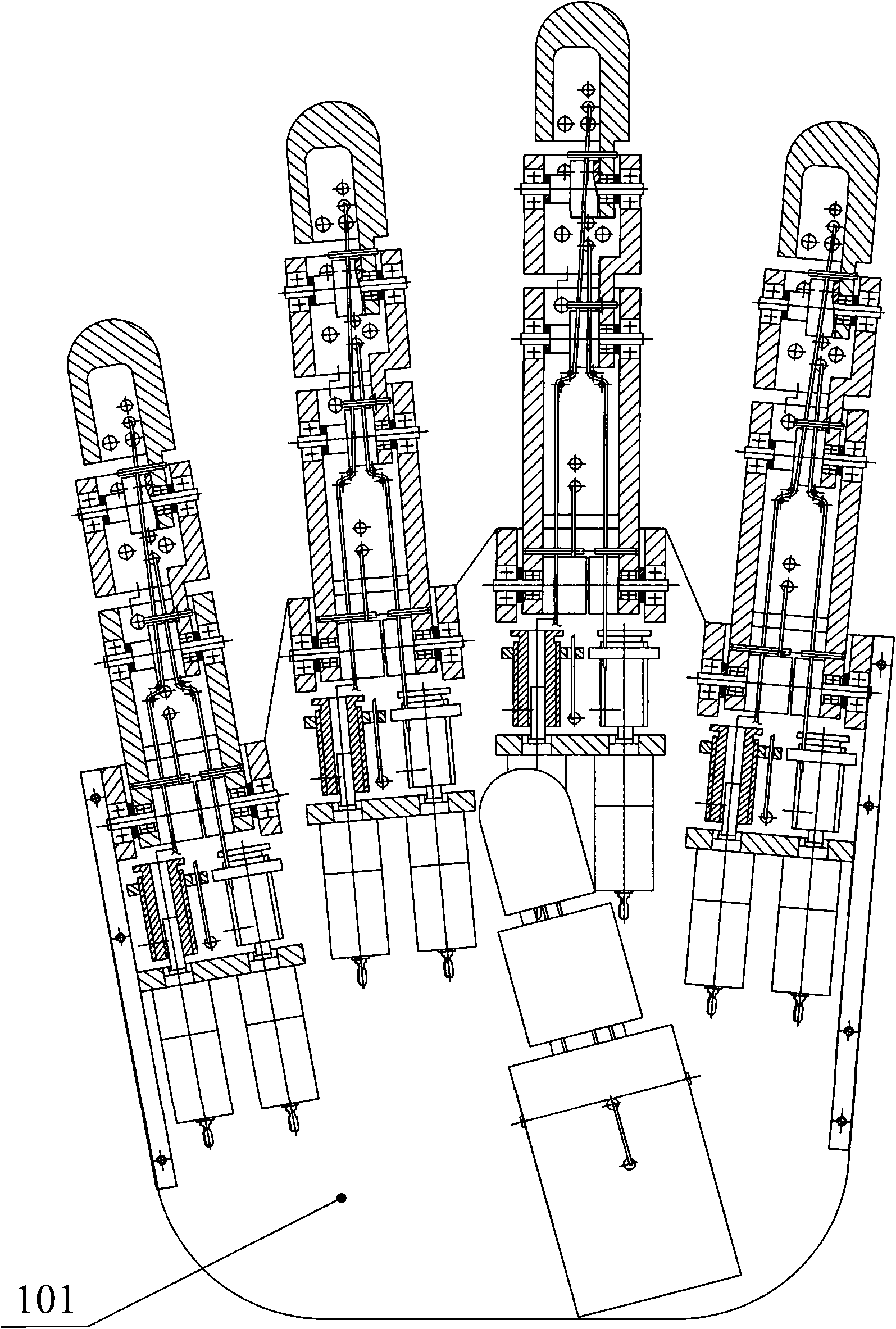
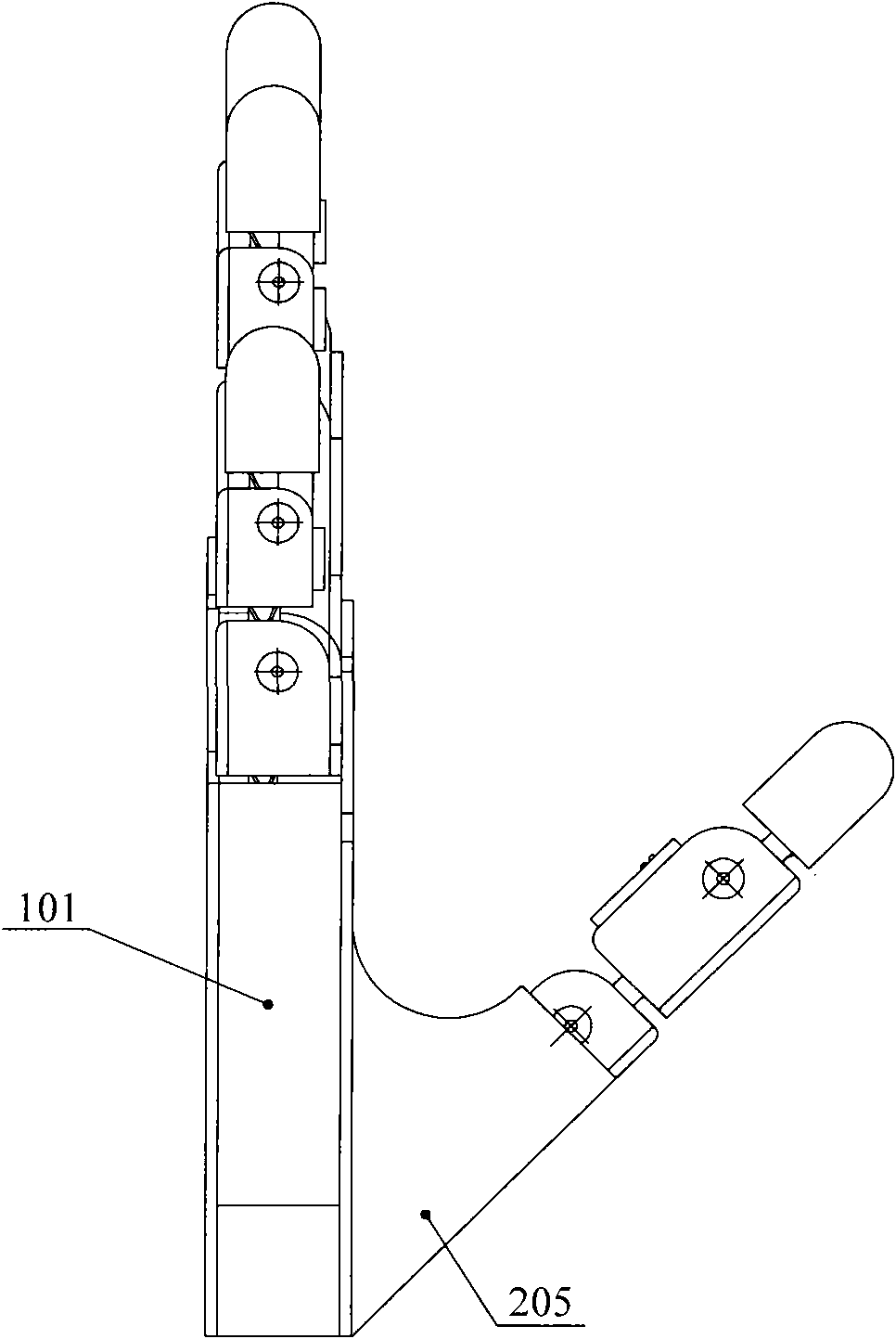
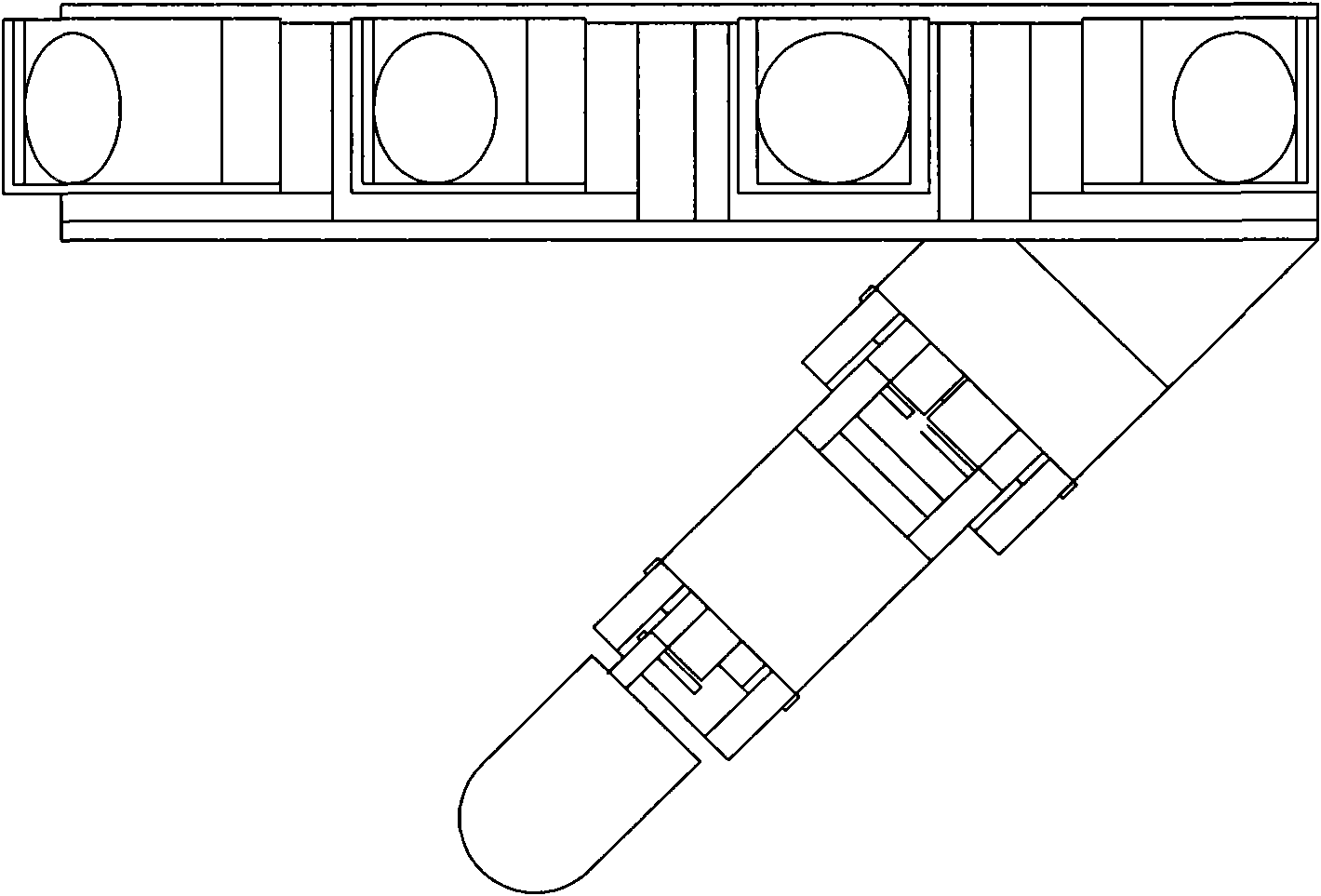
[0077] An embodiment of the tendon-rope parallel dexterous underactuated bionic robot hand device designed by the present invention, such as figure 1 , figure 2 , image 3 , Figure 4 , Figure 5As shown, palm 1, thumb 2, index finger 3, middle finger 4, ring finger 5 and little finger 6 are included. The structure of middle finger 4, ring finger 5, little finger 6 and index finger 3 of the present embodiment is the same, the difference is only the size, and the working principle is also consistent. The working principle of the thumb 2 in this embodiment is also partly the same as that of the index finger 3 . Thumb 2 structure like Image 6 , Figure 7 , Figure 8 , Figure 9 , Figure 10 and Figure 11 shown. The structure of the index finger 3 is as follows Figure ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More