

Bionic robot under-actuated delicacy hand device
A bionic robot and underactuated technology, applied in the field of anthropomorphic robots, can solve problems such as large differences in human hands, failure to achieve grasping effect, and affecting grasping effect
Inactive Publication Date: 2010-11-10
TSINGHUA UNIV
View PDF4 Cites 2 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
The disadvantage of this device is that before touching an object, the middle finger segment and the end finger segment can only be straightened and rotate around the proximal joint axis as a whole. This effect is more feasible to imitate the thumb, but if it is used to imitate The human hand has a three-joint index finger, middle finger, ring finger and little finger, which are still quite different from the human hand (the middle joint of the human hand has certain characteristics of active rotation), which greatly affects the grasping effect.
In addition, considering the actual situation of grasping objects by the index finger, middle finger, ring finger and little finger of the human hand, the end joints usually rotate synchronously with the middle joints, and the rotation angles of the two have a certain synergistic effect. This hand failed to achieve such a good grasping effect
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
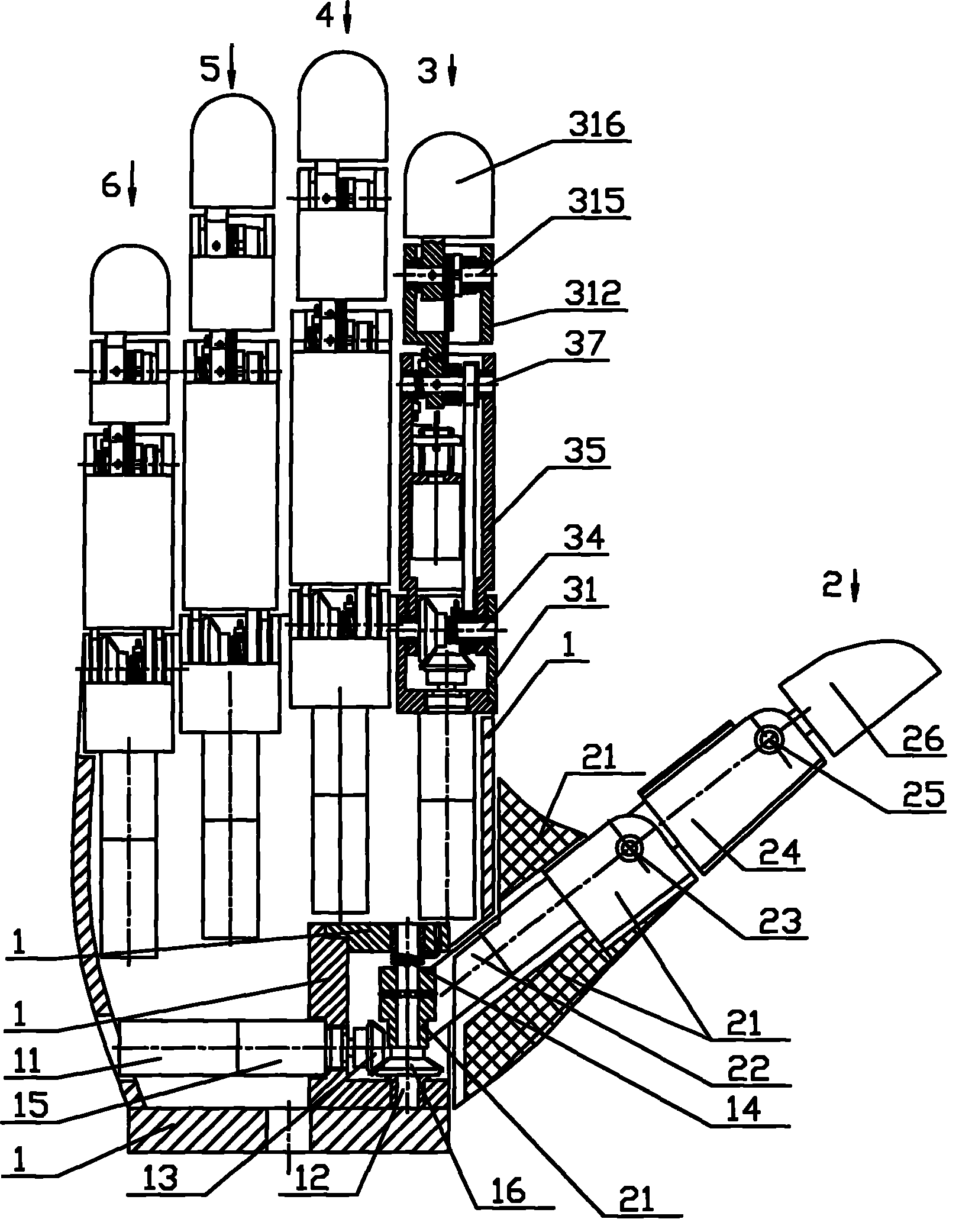
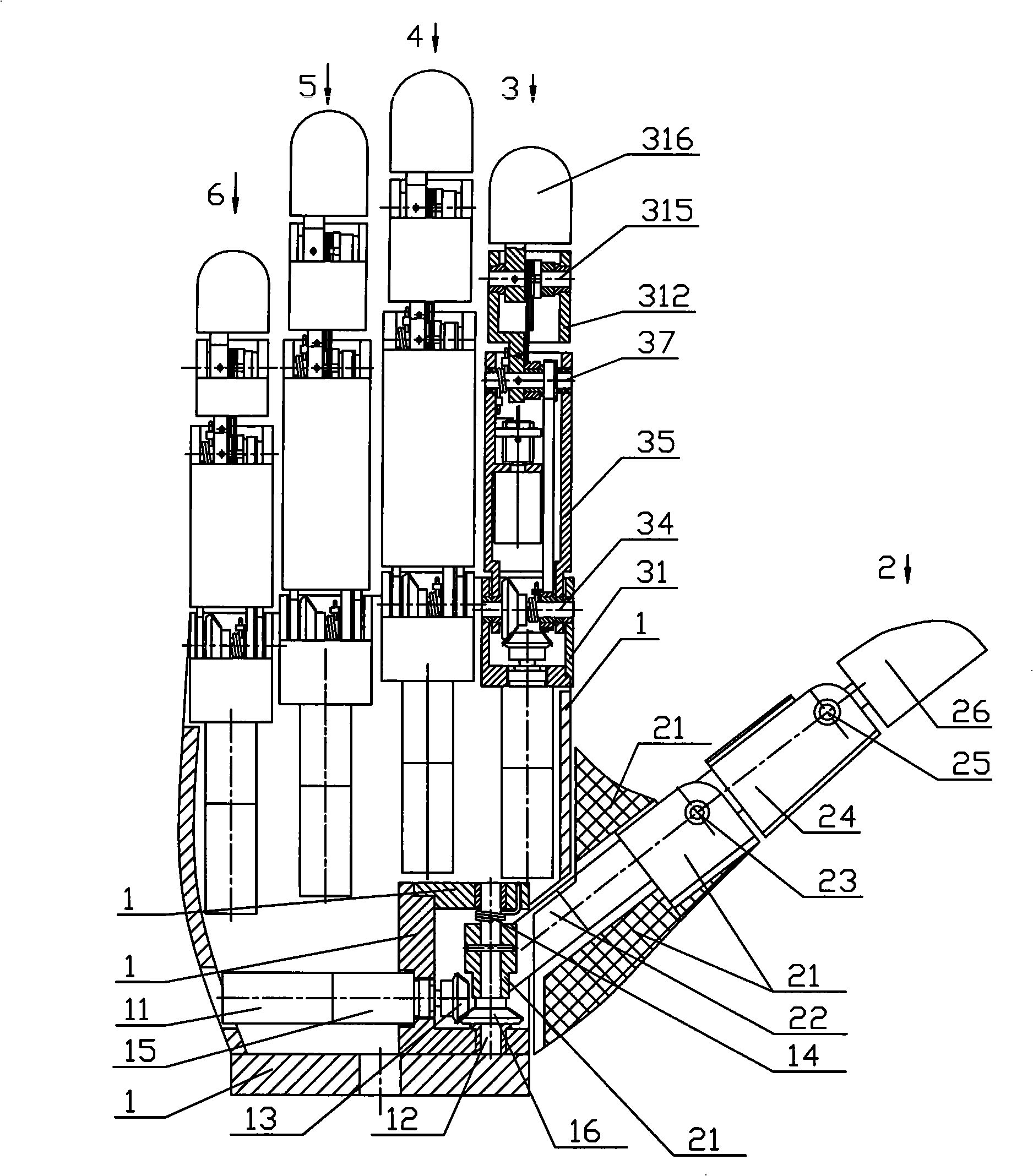
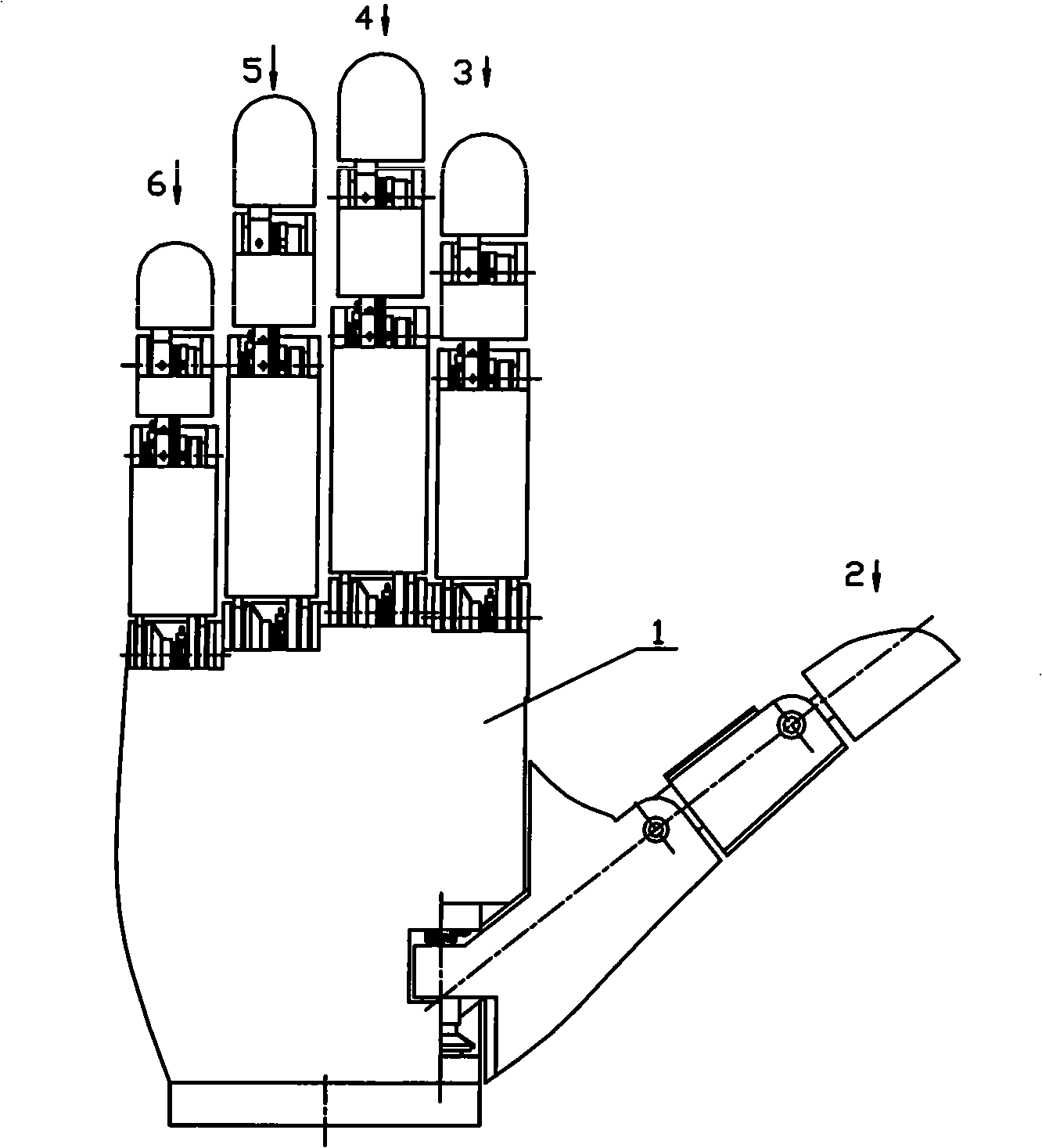
A bionic robot under-driven flexible hand device belongs to the technical field of anthropomorphic robot, and mainly comprises a thumb, a forefinger, a middle finger, a ring finger, a little finger and a palm. The device is provided with five independently controller fingers and fifteen joint freedoms, and is controlled by ten motors. The structures of four fingers (the forefinger, the middle finger, the ring finger and the little finger) are same. The variable initial configuration of finger and special effect of partial-coupling self-adapting grasping are realized through double motors, a transmission mechanism, a flexible component and reed component. The four fingers bend the second middle finger segment before grasping an object and the bottom finger segment bends for obtaining an excellent grasping preparing gesture. The robot hand is closer to man hand. The device of the invention has the advantages of compact structure, high integrity, external appearance, dimension and shape closer to man hand, capability for stably grasping and automatically adopting for objects with different shapes and dimensions. The device of the invention is used for anthropomorphic robot.
Description
Under-actuated dexterous hand device of bionic robot Technical field The invention belongs to the technical field of humanoid robots, and particularly relates to the structural design of an under-actuated dexterous hand device for a bionic robot. Background technique In the research of intelligent robots, people regard anthropomorphic robots as the highest level of robot research, and they have always regarded the realization of human-like behavior as their dream goal. Similar to humans, most functions of anthropomorphic robots need to be realized by hand operation, so the hand structure is an important part of anthropomorphic robots, and its design is one of the key technologies of anthropomorphic robots. A dexterous hand with a high degree of freedom that is purely actively driven usually has 3 to 5 fingers, and each finger has 3 to 4 degrees of freedom for actively driven joints. The dexterous hand can make almost all kinds of movements of the human hand, which can be divi...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityPatents(China)
IPC IPC(8): B25J19/00F16H25/20B25J15/00
CPCB25J15/0009
Inventor张文增侯宇
OwnerTSINGHUA UNIV