

Method for realizing landtype inertial navigation system movement aiming
An inertial navigation system and motion technology, applied in the field of initial alignment of inertial navigation systems, can solve problems such as filter divergence, speed output interference noise, and alignment failure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
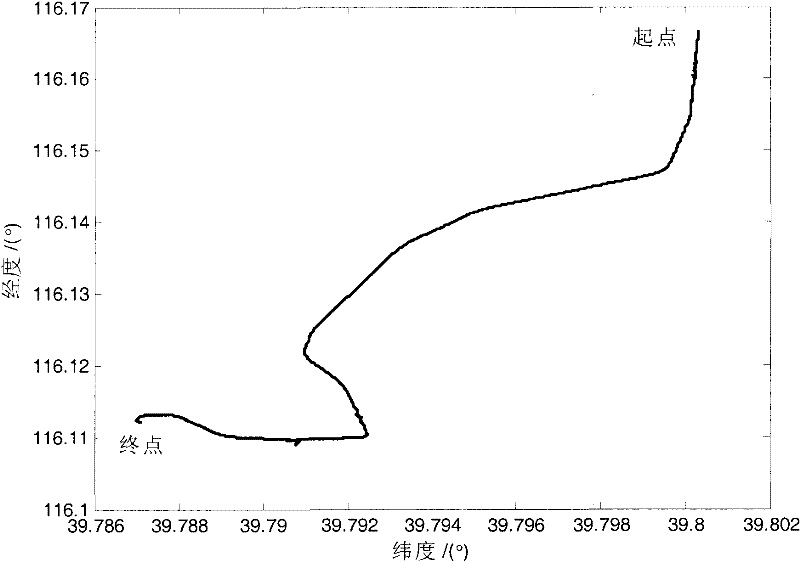
[0062] In this embodiment, the inertial navigation system is fixedly connected to the vehicle, and the GPS receiver is installed on the roof of the vehicle. The vehicle is stationary for 30 seconds for rough alignment and then starts to move. The trajectory is as follows: figure 1 As shown, the abscissa is latitude, and the ordinate is longitude. The random drift of the three gyroscopes is 0.01 / h, and the constant drift is 0.02 / h; the random drift of the three accelerometers is 50 μg, and the constant drift is 100 μg; the initial latitude is 39.800343; the initial longitude is 116.166874; the initial Elevation is 40.87m; outlier detection threshold J max =0.5; the state vector of the dynamic error model of the inertial navigation system is the zero vector; the observation equation noise η of the dynamic error model of the inertial navigat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More