

Modularized disaster rescue robot
A rescue robot, modular technology, applied in the field of robotics, can solve problems such as small load capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
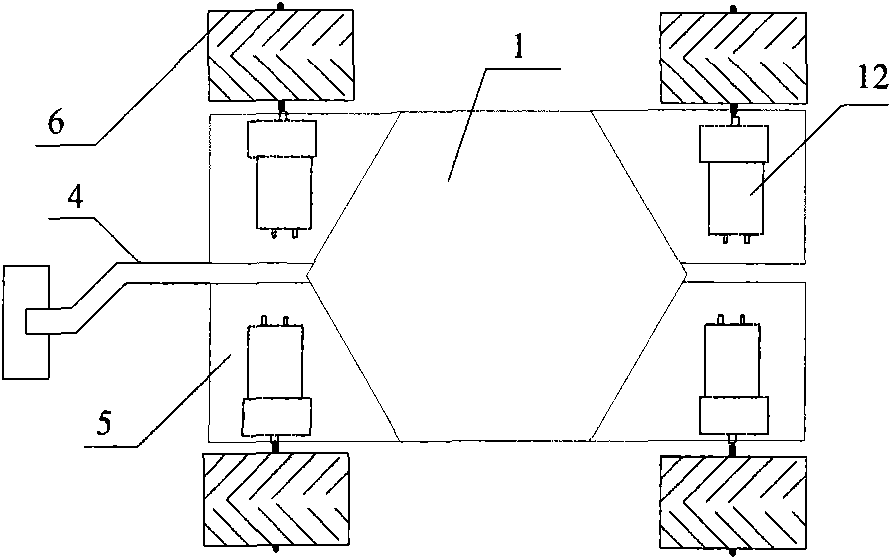
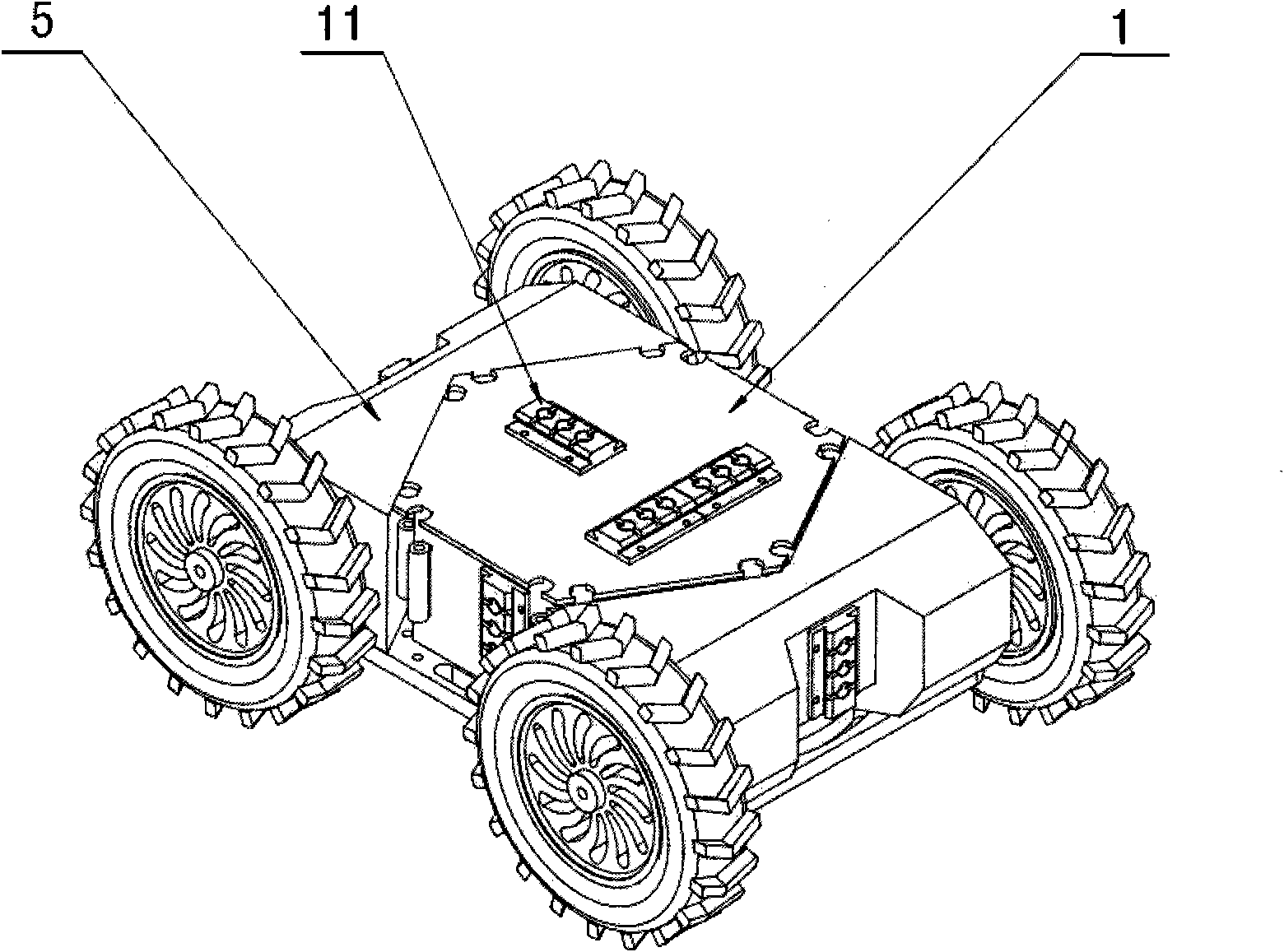
[0046] Such as figure 1 , image 3As shown, this embodiment includes a hexagonal main body module 1 and a mechanical arm 4 located on the main body module 1. The main body module 1 is connected to the moving mechanism 3 through an aviation plug. In this embodiment, the moving mechanism 3 adopts a wheeled mobile agency. Among them, the main body module 1 provides power and overall control for each mobile mechanism 3, and ensures the normal operation of the whole like the heart and the brain. And after the aviation plug is connected, the main module 1 will automatically recognize the mobile chassis mode of the mobile mechanism 3, so as to apply the corresponding mobile program to achieve the effect of "plug and play". This modular design can change the mobile mechanism according to different rescue environments, and select the mobile mechanism suitable for the environment, so as to maximize the effectiveness of the rescue robot and effectively improve its utilization efficienc...
Embodiment 2
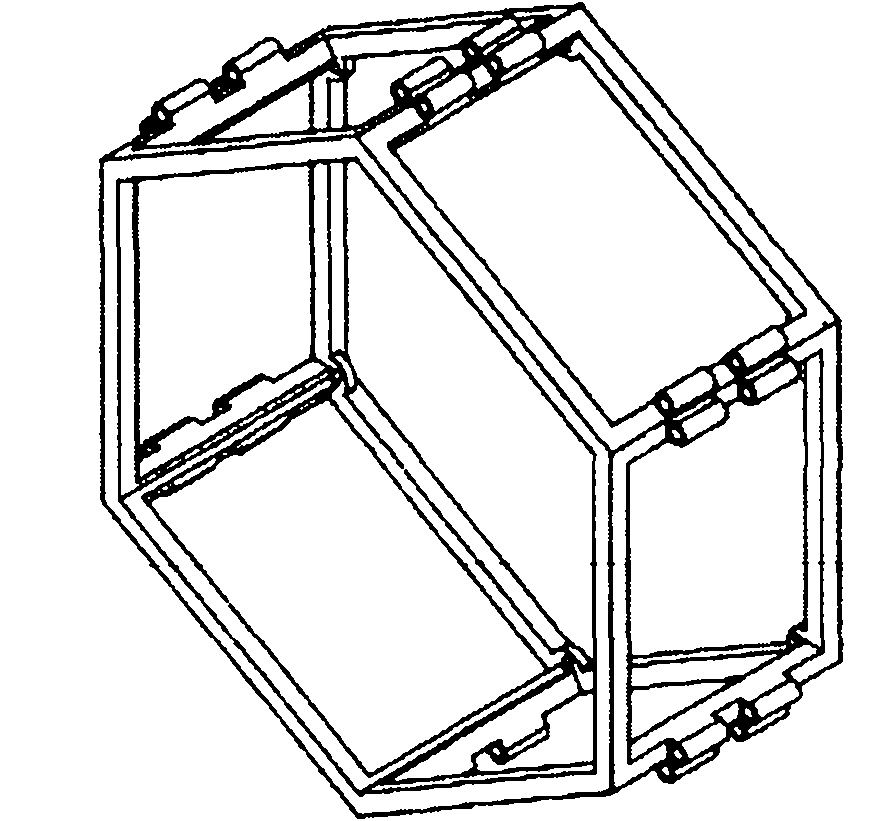
[0105] The difference between this embodiment and Embodiment 1 is that in this embodiment, the physical structure of the main module 1 is made of photosensitive resin material, and the column and beam sections are embedded.
[0106] In the manufacturing process, the machining process of the main module 1 adopts advanced laser rapid prototyping technology, and uses Somos ProtoTool 20L photosensitive resin material to generate a digital three-dimensional model into a solid body through 3D laser rapid prototyping. The manufacturing process is fast and environmentally friendly, and the technical advantages of CAD and CAM are used to the greatest extent to enhance the performance of the mechanical structure and save costs. After calculation and analysis of the finite element structure, it was found that there were stress concentration points in the beams of the main frame, and defects such as poor pressure resistance of the pillars. In order to overcome this defect, the design adop...
Embodiment 3
[0109] The difference between this embodiment and Embodiment 1 is that in this embodiment, the moving mechanism 3 adopts a leg crawler type moving mechanism. Such as Figure 14 As shown, the moving mechanism 3 includes a footwear chassis module 7 and four footwear modules 8 connected thereto, the four footwear modules 8 are symmetrically distributed, and the motors controlling the footwear modules 8 are located on the footwear chassis module 7, and each Each leg module 8 corresponds to a control motor. In addition, various instruments and equipment can be loaded on the leg-tracking chassis module 7 to complete various tasks. It is a carrying platform and generally maintains a horizontal posture during motion. The leg module 8 is a motion unit, which can rotate around the main body of the robot to assist the robot to climb and overcome obstacles.
[0110] Such as Figure 14 As shown, the leg-tracking mobile robot has four degrees of freedom, the crawler itself rotates and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More