

Method for estimating the horizontal velocity of unmanned aerial vehicles, especially those capable of performing hovering flight under autopilot
A technology of automatic driving and unmanned aerial vehicles, applied in the field of driving unmanned aerial vehicles, can solve the problems of inaccuracy and unreliable results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The following is a description of how the invention performs.
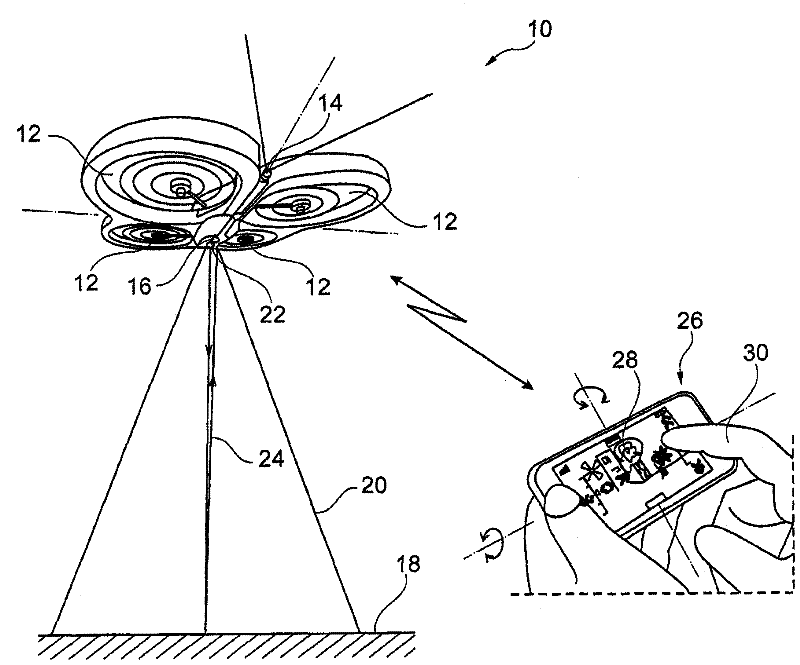
[0048] figure 1 Among them, reference numeral 10 is an overall reference diagram of the unmanned aerial vehicle, such as a quadrotor helicopter, such as the AR.Drone model produced by Parrot SA in Paris, France. The drone 10 has four coplanar rotors 12 whose motors are independently controlled by an integrated flight and altitude control system.
[0049] The drone 10 also includes a forward looking first camera 14 for capturing pictures of the scene in the direction the drone is heading, and a looking down vertically oriented camera 16 adapted to take sequential digital pictures of the terrain 18 over which the drone is flying. The viewing angle of the camera, indicated at 20 in the figure, may have, for example, a diagonal of 64° and a resolution of 176×144 pixels (of course, these values are given purely by way of example).
[0050] The UAV 10 is also provided with an ultrasonic altimeter 22 that tran...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More