

Off-line Simulation Control System for Palletizing Robot
A palletizing robot and control system technology, applied in the field of robot control, can solve problems such as the technical constraints of palletizing robots, and achieve the effect of fast and efficient collision detection and data communication services
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The embodiments of the present invention are described in detail below. This embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following implementation example.
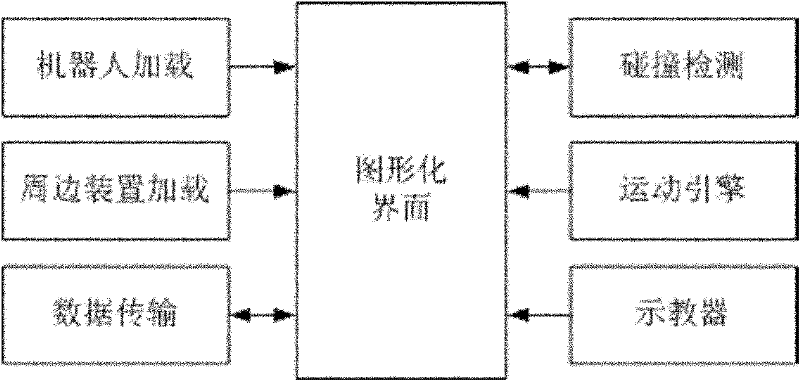
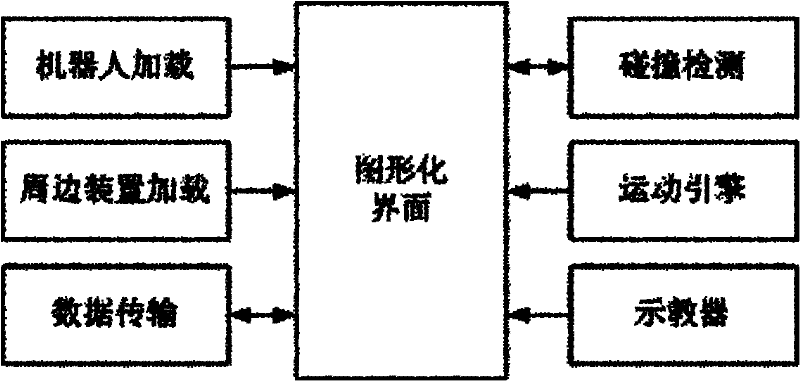
[0014] Such as figure 1 As shown, this embodiment includes: a robot loading module, a peripheral device loading module, a collision detection module, a motion engine module, a teach pendant module and a data transmission module, wherein the robot loading module is connected with the graphic unit to transmit the robot model and in Displayed in the graphical unit, the peripheral device loading module provides various peripheral devices such as conveyor belts and pallets for the system and displays them in the graphical unit, and the collision detection module provides collision detection services for the robot and pe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More