

Force feedback interactive device for automatically regulating balance of dead weight
A technology of interactive equipment and force feedback, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of inconvenient disassembly, maintenance and replacement of parts, limited application or environment, expensive materials and equipment, etc., to achieve motion accuracy. And the effect of high repetition accuracy, large movement space and good isotropy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
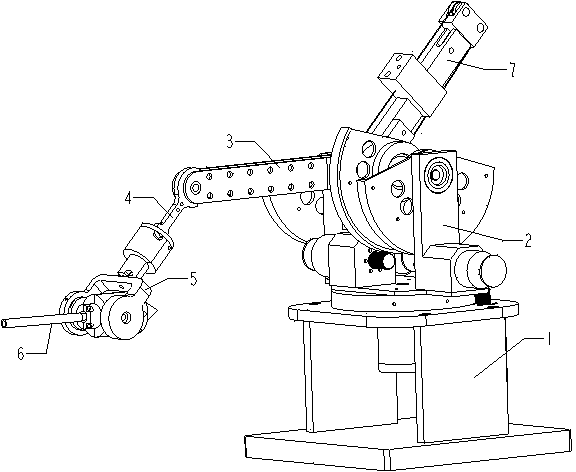
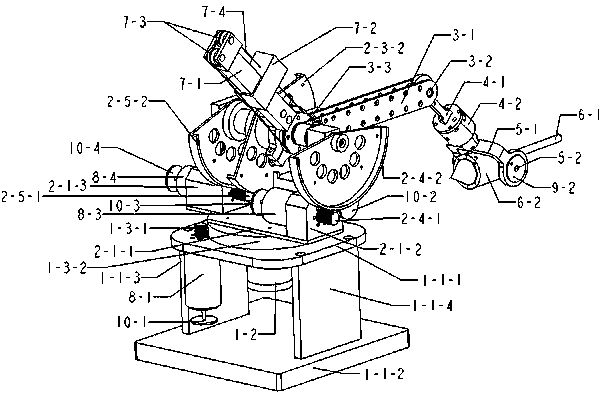
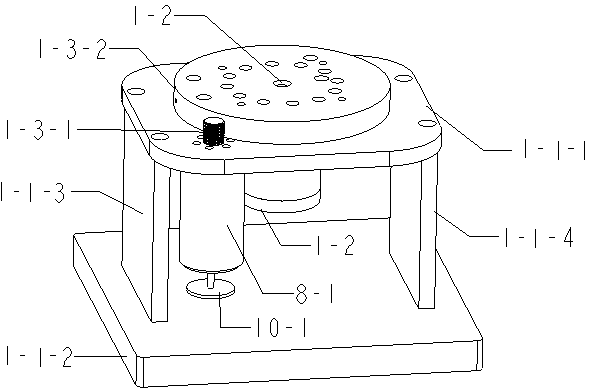
[0063] combined with Figure 1-15 The description is as follows: the present invention is a human-computer interaction force feedback device with three degrees of freedom and six degrees of freedom in space movement. In order to improve the influence of gravity, an autonomous adjustment balance mechanism (7) is introduced. The self-adjusting balance mechanism (7) comprises four parts: a balance bar (7-1), a balance slide block (7-2), a pulley (7-3) and a steel wire rope (7-4). The gravity of each arm link of the force feedback device is compensated by adjusting the balance slider (7-2) on the balance bar (7-1). The self-adjusting balance mechanism relies on the motor (8-4) installed on the shoulder support frame to drive and control the position of the balance slider on the balance bar through the cooperation of the steel wire rope and the balance mechanism deceleration device, and uses the principle of leverage to improve the gravity on the arm. impact. The balance mechanis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More