

Paster of multidimensional force sensor and bridging method
A multi-dimensional force sensor and sensor technology, applied in the field of sensors, can solve the problems of low decoupling precision, achieve high decoupling precision, simple decoupling method, and solve the effect of inter-dimensional coupling problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
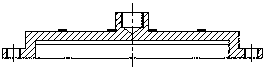
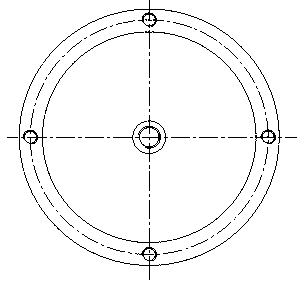
[0034] Taking the two-dimensional force sensor of bone as an example, the study solves the problem of inter-dimensional coupling from the design root of the sensor. The bone two-dimensional force sensor can realize the measurement of the axial tensile pressure and radial shear force of the bone. The structural diagram is as follows figure 1 , as shown in 2. First, the analytical solution of the strain of the bone two-dimensional force sensor under the action of axial tension pressure and radial shear force is deduced according to the thin plate theory.
[0035] (1)
[0036] (2)
[0037] In the formula: a is the outer diameter of the elastic body, b is the inner diameter of the elastic body, h is the film thickness of the elastic body, E is the elastic modulus of the sensor, is the Poisson’s ratio of the se...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More