

Foot-end dual-range three-dimensional force detector for exoskeleton or biped robots
A biped robot and detection device technology, applied in the field of robotics, can solve problems such as single detection information, failure to meet control requirements, inter-dimensional coupling, and difficulty in accurately judging human motion intentions, to achieve high detection accuracy and avoid inter-dimensional coupling problems, the effect of improving control efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
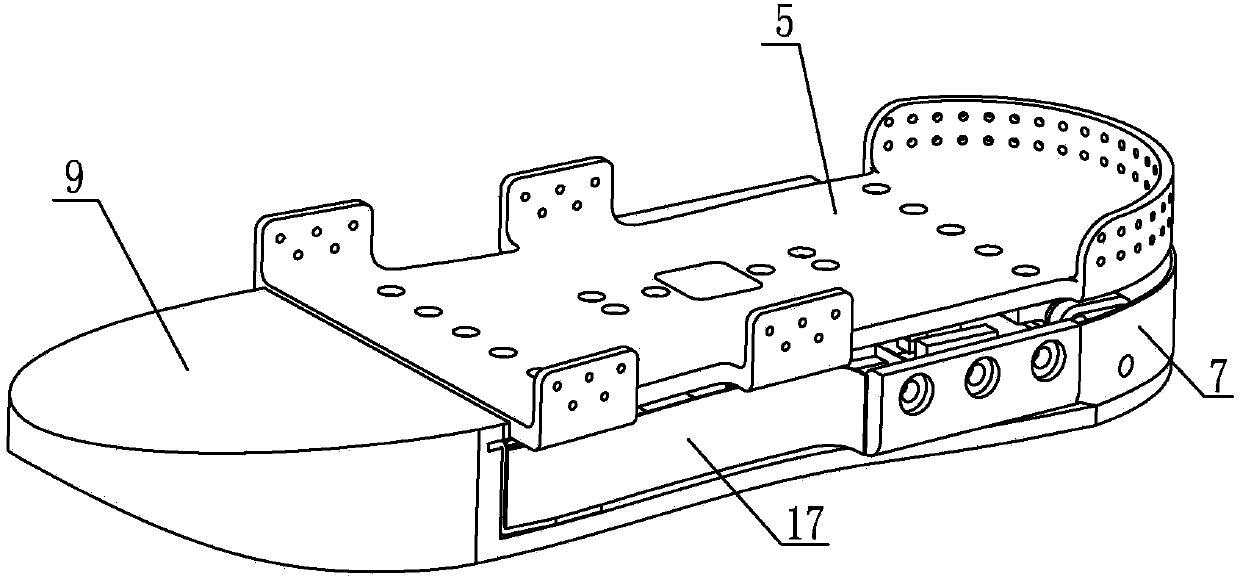
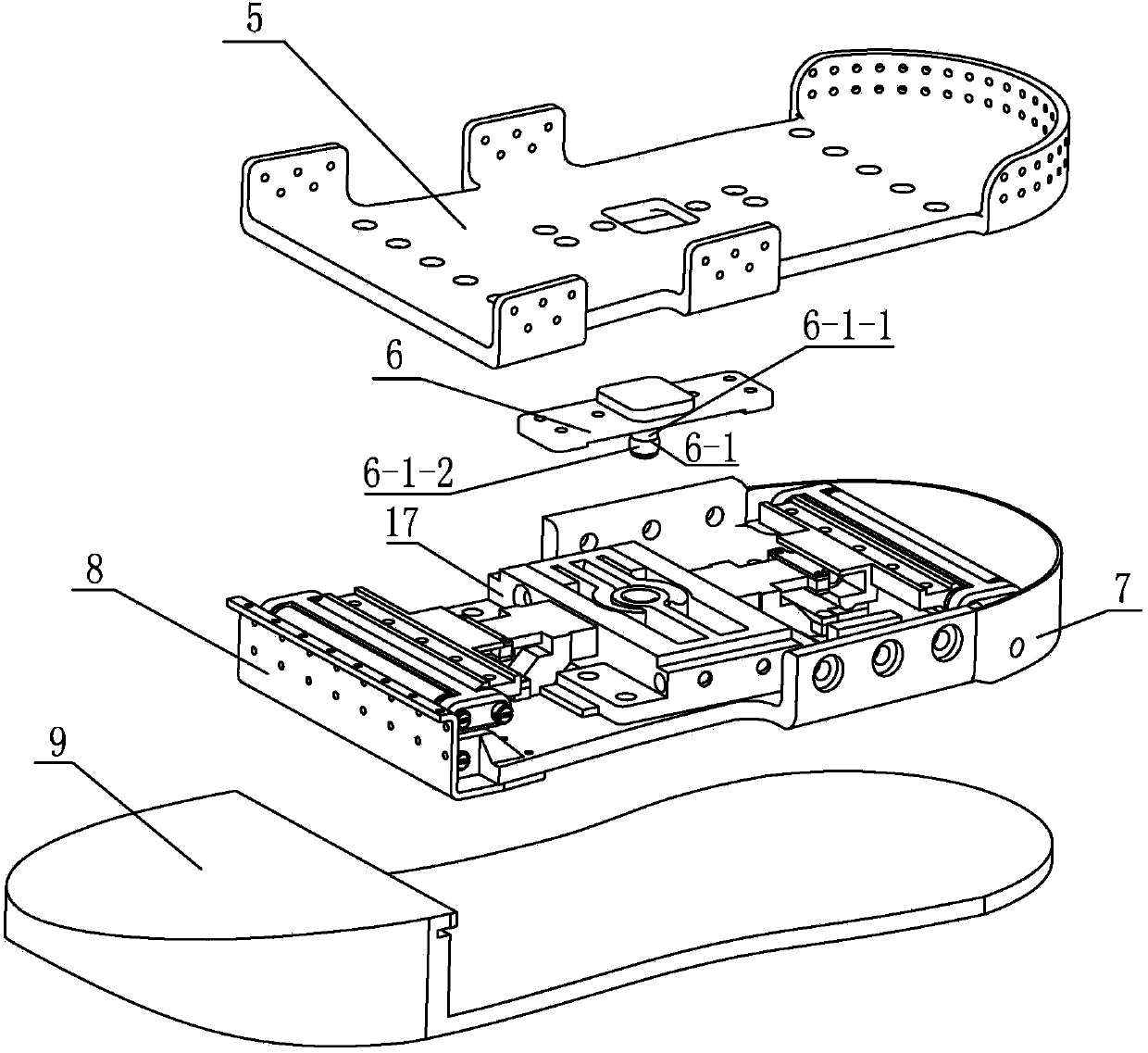
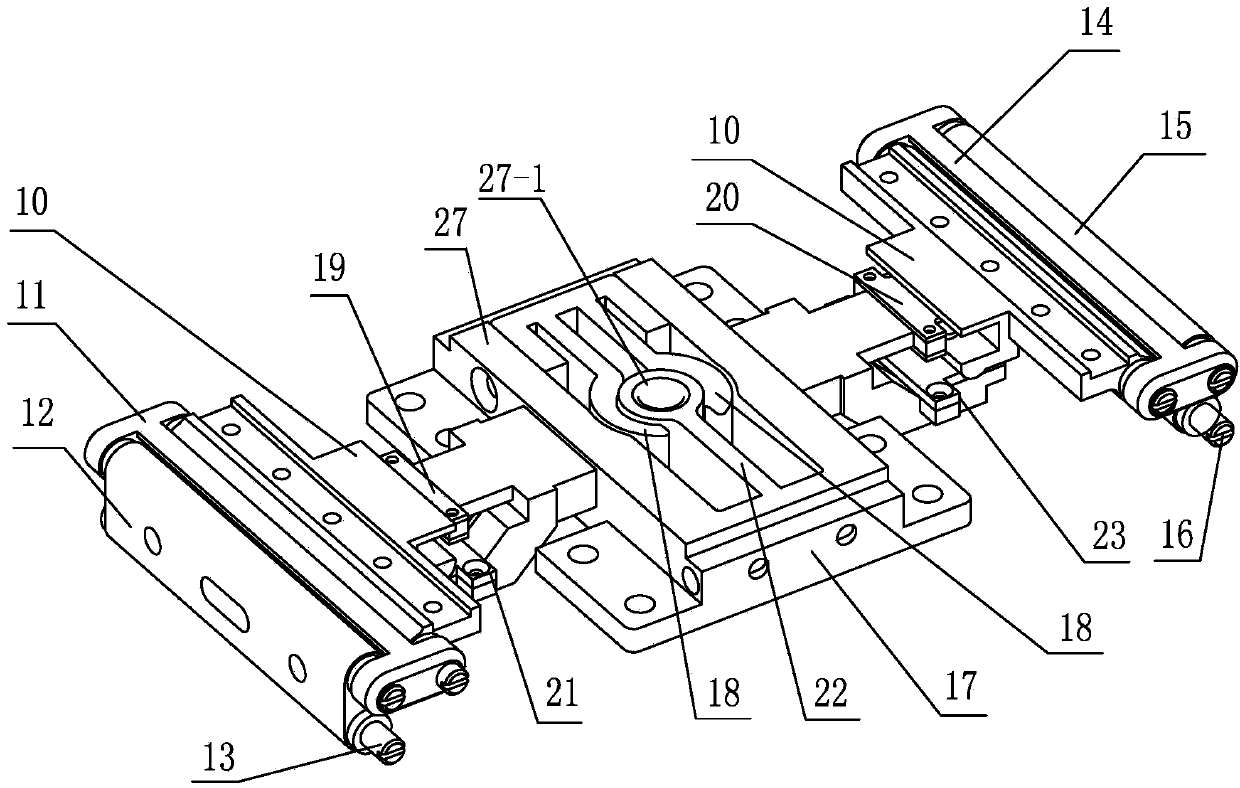
[0010] Specific implementation mode one: combine Figure 1-Figure 3 Illustrates that a dual-range three-dimensional force detection device for an exoskeleton or a biped robot in this embodiment includes an insole plate 5, a horizontal force transmission plate 6, a foot plate 7, a foot rubber shock-absorbing pad 9, and a first connecting rod 11 , the second connecting rod 12, the third connecting rod 14, the fourth connecting rod 15, the elastic body 17 and two trough support plates 10;
[0011] The elastic body 17 includes a body 27, a first cantilever beam 19, a second cantilever beam 20, a third cantilever beam 22, a first elastic plate 21, a second elastic plate 23, a third elastic plate 18 and six strain gauges 25 The middle part of body 27 is processed with the 3rd cantilever beam 22 that vertically arranges, and the body 27 of both sides of the 3rd cantilever beam 22 respectively is equipped with the 3rd elastic plate 18 that longitudinally arranges, and the both sides o...
specific Embodiment approach 2
[0015] Specific implementation mode two: combination Figure 2-Figure 4 Note that the protrusion 6-1 in this embodiment includes a cylinder 6-1-1 and a hemispherical protrusion 6-1-2, the upper end surface of the cylinder 6-1-1 is connected to the horizontal force transmission plate 6, and the cylinder The lower end surface of 6-1-1 is connected with the middle part of the bottom surface of the hemispherical protrusion 6-1-2, and the hemispherical protrusion 6-1-2 is inserted into the through hole 27-1. In this way, a spherical force transmission configuration structure is designed for the force information transmission of the third cantilever beam, which reduces friction loss and improves detection sensitivity. Others are the same as in the first embodiment.
specific Embodiment approach 3
[0016] Specific implementation mode three: combination Figure 4 Explain that one end of the first cantilever beam 19 in this embodiment is processed with a spherical portion, one end of the second cantilever beam 20 is processed with a spherical portion, and the spherical portion of the first cantilever beam 19 is inserted into one of the grooved support plates 10 In the opening of the second cantilever beam 20 , the spherical portion is inserted into the opening of the remaining one trough-shaped support plate 10 . In this way, a spherical force transmission configuration structure is designed for the force information transmission of the third cantilever beam, which reduces friction loss and improves detection sensitivity. Others are the same as in the first or second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More