

Biostimulation neural network device and method for jointly rescuing by multiple underground robots
A biostimulation and multi-robot technology, applied in the field of multi-robot search and rescue, can solve the problems of missing the best time for underground search and rescue, the failure of the robot to return normally, and the long time spent
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] In order to further explain the technical means and effects that the present invention adopts to achieve the intended purpose of the invention, below in conjunction with the accompanying drawings and preferred embodiments, the specific implementation, structure, features and effects of the present invention will be described in detail as follows: rear.
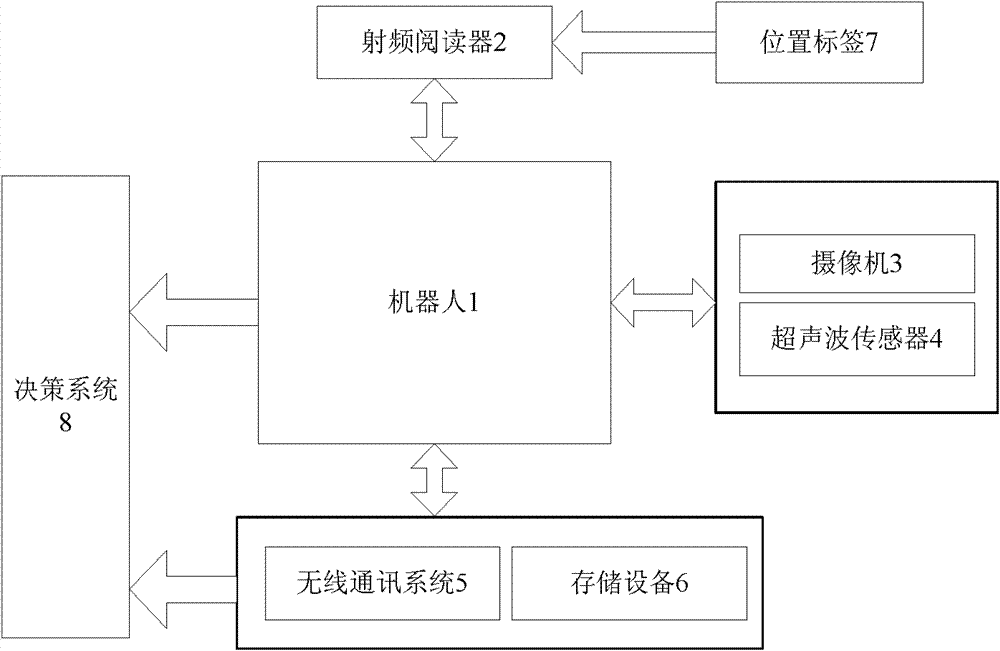
[0046] Biostimulating neural network equipment for underground multi-robot joint search and rescue, such as figure 1As shown, it includes a robot 1, a radio frequency reader 2, a camera 3, an ultrasonic sensor 4, a wireless communication system 5, a storage device 6, a location radio frequency tag 7 and a ground search and rescue decision system 8, wherein the radio frequency reader 2, the camera 3, the ultrasonic sensor 4. The wireless communication system 5 and the storage device 6 are all installed on the robot 1. The robot 1 collects real-time images underground through the camera 3 and transmits them to the ground ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More