

A mine disaster search and rescue and toxic and harmful gas monitoring system and its working method based on obstacle avoidance UAV
A harmful gas and monitoring system technology, which is applied in the field of mine disaster search and rescue and toxic and harmful monitoring systems, can solve the problems that cannot satisfy the monitoring of toxic and harmful gases, and achieve the effects of fast search and rescue, improved safety, and avoiding length restrictions and entanglement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
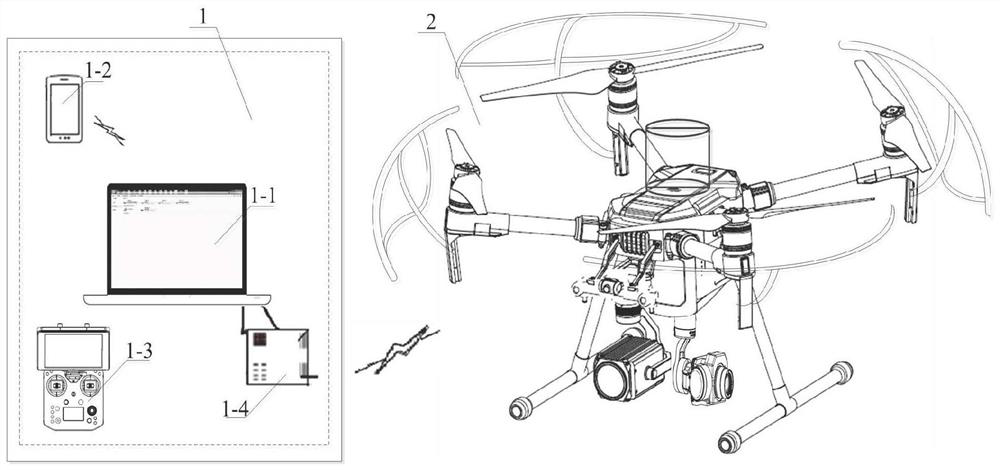
[0031] Mine disaster search and rescue and toxic and harmful gas monitoring system based on obstacle avoidance UAV, such as figure 1 As shown, including user monitoring station 1 and obstacle avoidance UAV flight search and rescue and monitoring platform 2;
[0032] User monitoring station includes PC 1-1, handheld terminal 1-2, RC controller 1-3 and wireless modem 1-4, handheld terminal 1-2 and RC controller 1-3 are wirelessly connected to PC 1-1, PC The aircraft 1-1 is wirelessly connected to the obstacle avoidance UAV flight search and rescue and monitoring platform 2 through a wireless modem 1-4.
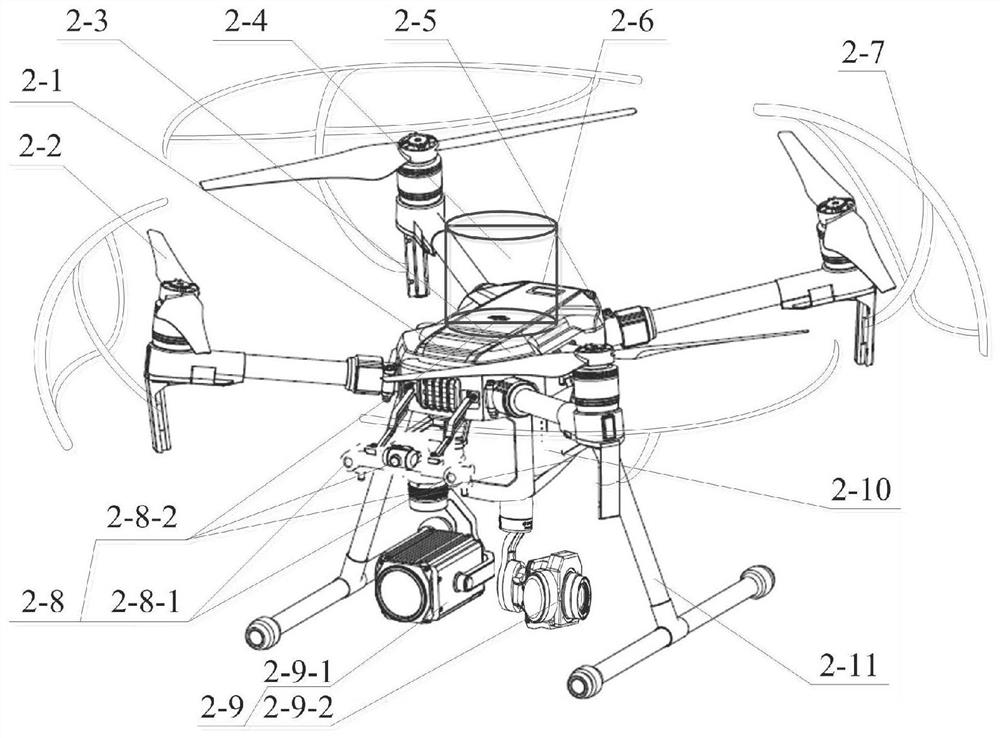
[0033] Obstacle avoidance UAV flight search and rescue and monitoring platform 2 includes UAV flight platform 2-1, motor propeller blade assembly 2-2, navigation and flight control integrated system 2-3, toxic and harmful gas monitoring system 2-4 , remote control receiving decoding system 2-5, wireless communication system 2-6, annular elastic protective frame 2-7, obstacle av...
Embodiment 2
[0037] Operation process of mine disaster search and rescue and toxic and harmful gas monitoring system based on obstacle avoidance UAV:
[0038] After the mine disaster occurs, the search and rescue personnel carry the user monitoring terminal 1, the obstacle avoidance drone and the toxic and harmful gas monitoring flight platform 2 to the nearest safe area of the mine disaster. Start the take-off device of the obstacle-avoiding UAV to ensure the normal take-off of the UAV; after receiving the take-off and destination instructions sent by the user monitoring station PC 1-1 through the wireless modem 1-3 when the take-off environment is confirmed to be good, the obstacle avoidance UAV flight search and rescue and monitoring platform 2 starts navigation and flight control integrated system 2-3 and obstacle avoidance subsystem 2-8 to fly to the mine destination, and 4 motor blade assemblies 2-2 receive navigation and flight control integration The control signal sent by the au...
Embodiment 3
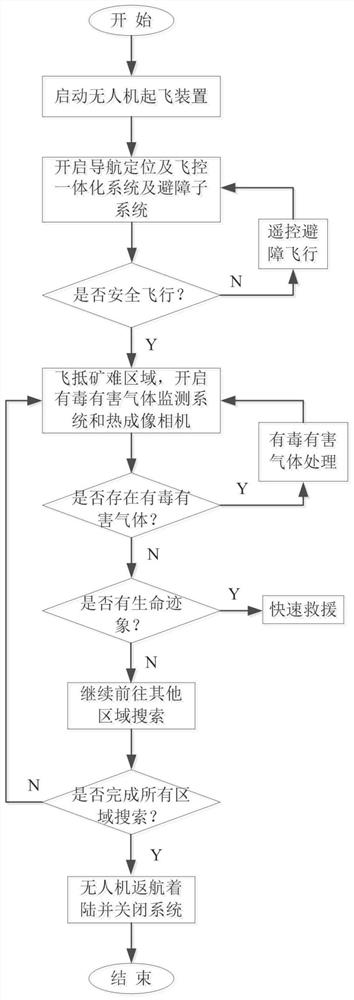
[0042] Step a, the search and rescue personnel carry the user monitoring terminal (1) and the obstacle avoidance UAV search and rescue and toxic and harmful gas monitoring flight platform (2) to a safe area near the mine accident, and start the UAV flight platform (2-1);
[0043] Step b, send a take-off command, turn on the integrated navigation and positioning and flight control system (2-3) and the obstacle avoidance subsystem (2-8), the operator combines the video information collected by the high-definition camera and the searchlight (2-9-2) and The obstacle avoidance subsystem (2-8) controls the RC controller (1-3) to ensure the safe flight of the UAV in the mine;
[0044] Step c, turn on the toxic and harmful gas monitoring system (2-4) and the thermal imaging camera (2-9), and the unmanned aerial vehicle searches and advances and flies to the mine disaster area;
[0045] Step d, real-time collection of thermal imaging information around the mine disaster area, toxic and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More