

Tandem experiment facility with five degrees of freedom for simulating ankle gaits
An experimental device and degree-of-freedom technology, used in medical science, sports accessories, surgery, etc., can solve problems such as different dynamic models that do not take into account the key dynamic factors of walking motion, and cannot reflect motion and force conditions.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The embodiments of the present invention are described in detail below. This embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following implementation example.
[0036] The present invention will be described in further detail below in conjunction with the accompanying drawings.
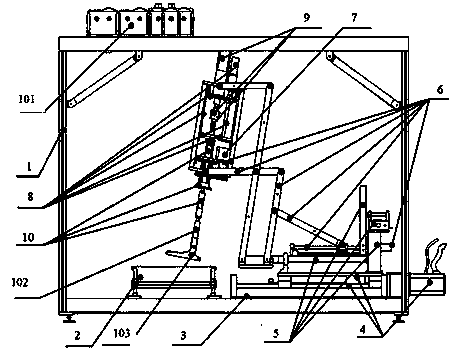
[0037] see figure 1 As shown, the present invention includes: overall device frame 1, force plate fixed support 2, forward and backward moving mechanism and control system fixed plate 3, forward and backward moving mechanism and control system 4, rotation mechanism and control system 5 in the coronal plane, In-plane rotation mechanism and control system 6, in-horizontal plane rotation mechanism and control system 7, vertical in-plane movement mechanism and control system 8, tibial axial load...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More