

Numeric control device
A technology of numerical control device and rotating shaft, applied in the direction of automatic control device, feeding device, program control, etc., can solve problems such as parallelism error, translation error, attitude error, etc., achieve high-precision processing and realize the effect of processing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
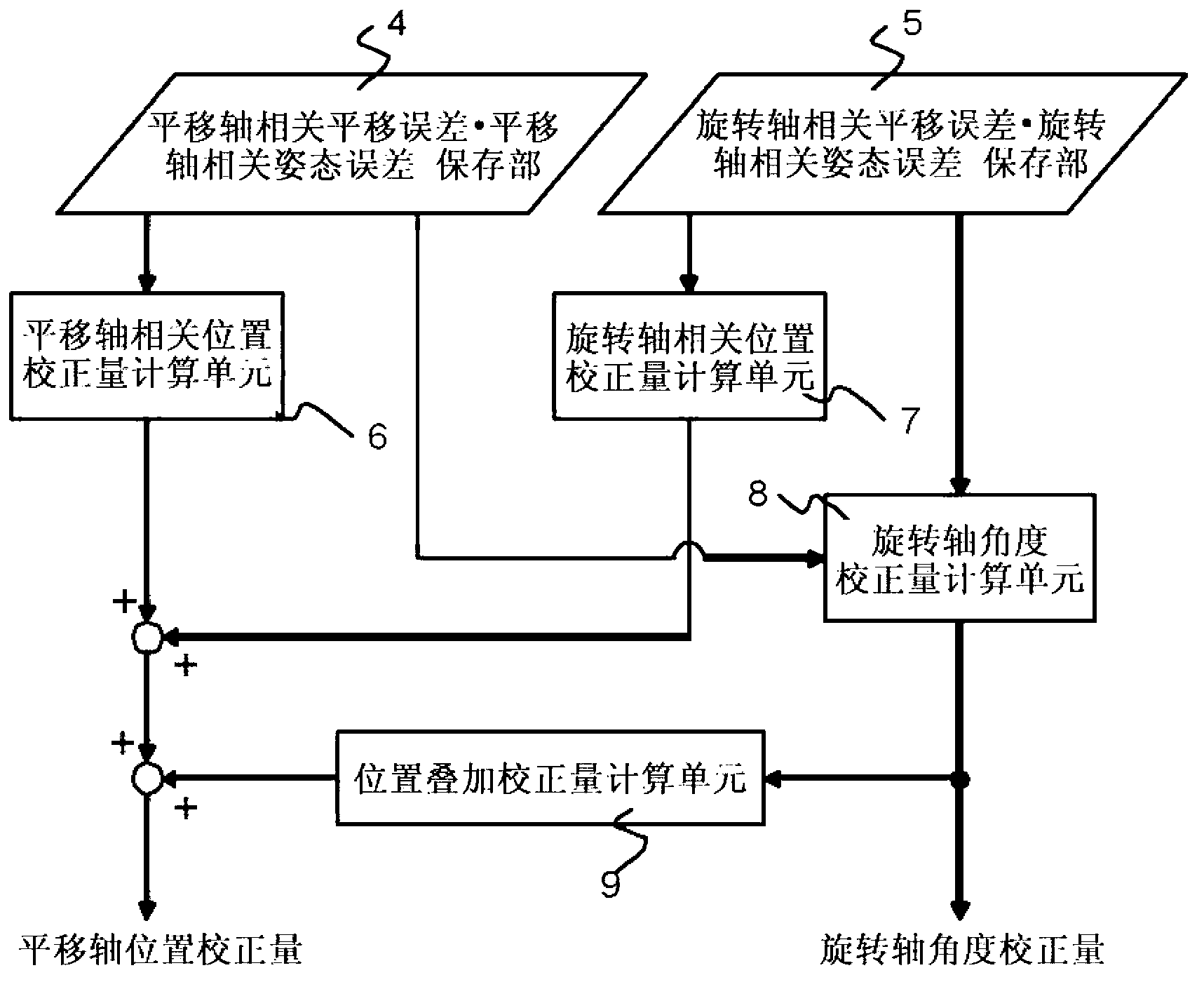
[0040] Next, use Figure 1 to Figure 4 Example 1 of the present invention will be described. also, figure 1 It is a configuration diagram showing a portion of the numerical control device in the first embodiment that calculates the translation axis position correction amount and the rotation axis angle correction amount. In addition, the hardware structure of the numerical control device in this embodiment 1 is a general structure composed of a CPU, a memory, etc. In addition, the structural elements other than the storage parts 4 and 5 (memory) (translational axis-related position correction amount calculation unit 6, rotation The axis-related position correction amount calculation unit 7 , the rotation axis angle correction amount calculation unit 8 , the position superposition correction amount calculation unit 9 , etc.) are mainly composed of software.
[0041] exist figure 1 In the translation axis-related translation error and translation axis-related attitude error...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More