

Double-feet passive walking state control method with knee bending behavior
A technology for gait control and behavior, applied in motor vehicles, transportation and packaging, etc., can solve the problems of high energy consumption, low control efficiency, poor inherent stability of robots, etc., and achieve improved slope range, good stability, and improved slope surface. The effect of walking ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
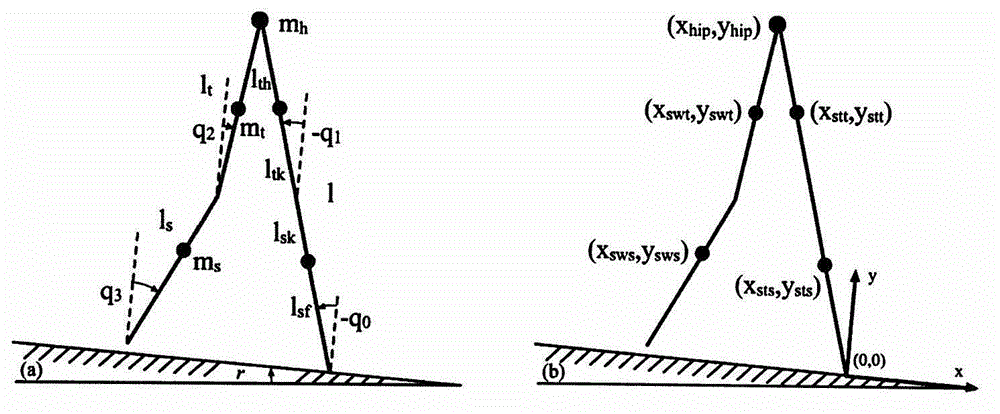
[0026] A biped passive walking gait control method with knee-bending behavior, the method passes such as image 3 The five-mass-point four-rod walking model shown is realized. The five mass points are the centers of mass of the hip joint, two thighs and two calves, which characterize the mass distribution of the model. The four rods are two thighs and two calves, and the thighs are The hip joint is connected, and the lower leg is connected to the thigh through the knee joint to form a swing leg and a supporting leg. The state of the walking model can be expressed as: In the formula, q 0 ,q 1 ,q 2 ,q 3 are the included angles of the supporting leg calf, supporting leg thigh, swinging leg thigh, and swinging leg calf relative to the normal of the walking slope.
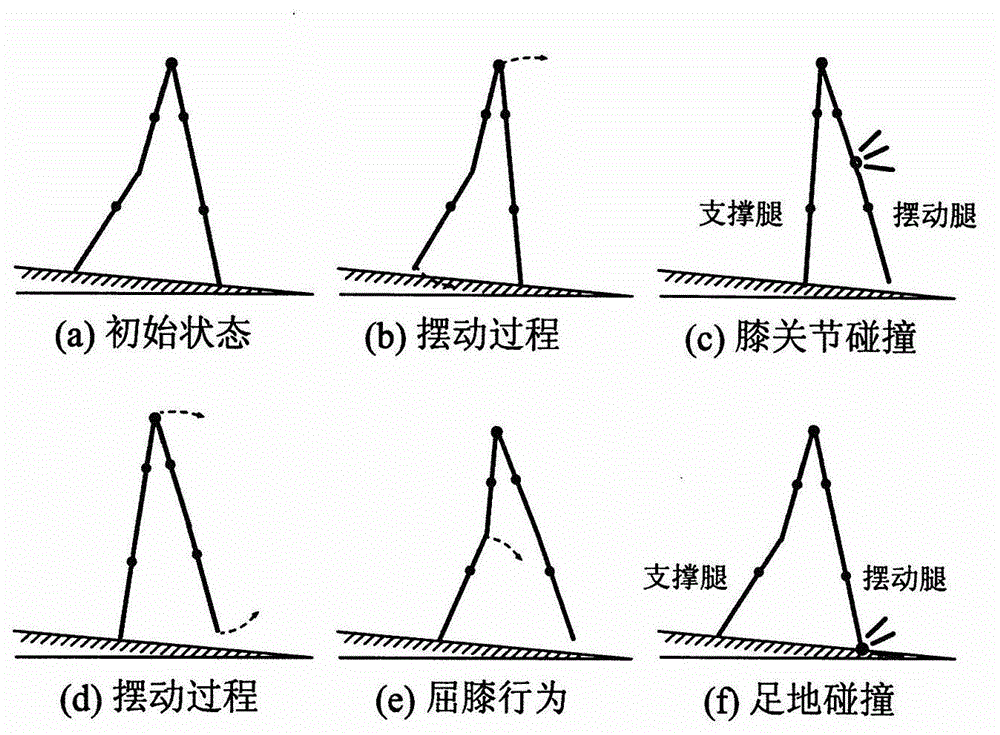
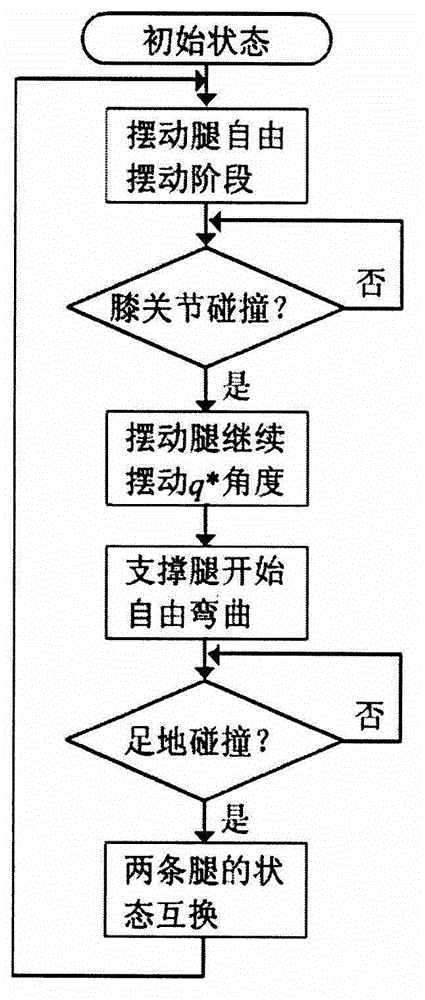
[0027] The entire control process is as figure 1 and figure 2 As shown, it specifically includes the following steps:
[0028] The first step, the initial state, such as figure 1 (a): The moment when the swin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More