Parallel link robot and its action teaching method
A teaching method and robot technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of time-consuming, parallel-link robot duplication, etc., and achieve the effect of easy action teaching
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach )
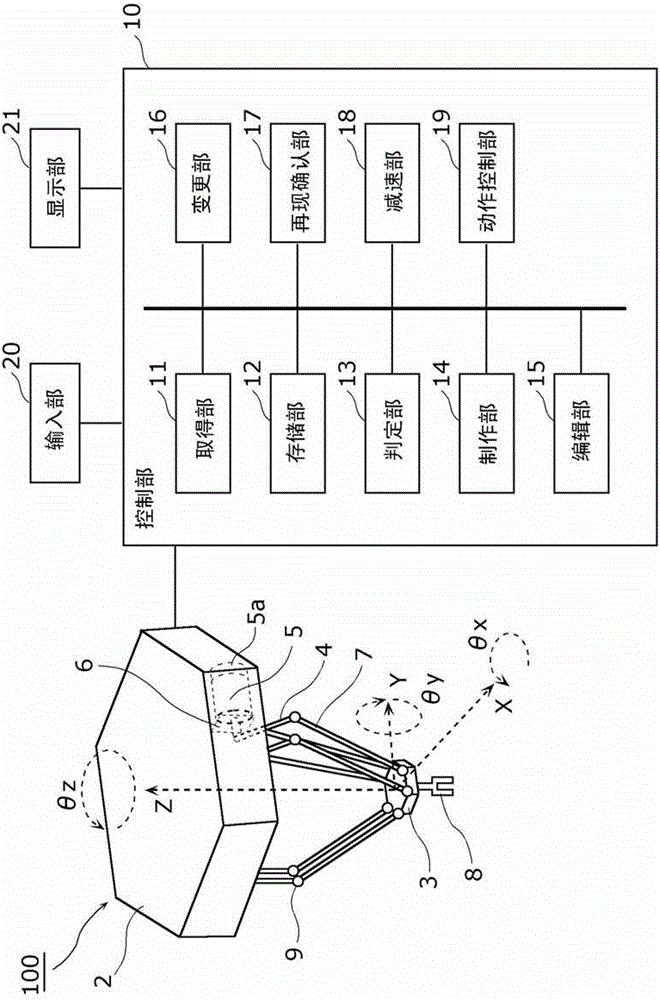
[0026] figure 1 It is a schematic configuration diagram of the parallel link robot 100 according to the embodiment of the present invention. exist figure 1 Among them, the parallel link robot 100 connects the fixed plate 2 and the movable plate 3 through the arm portion 4 and the rod portion 7 . In addition, in the parallel link robot 100 , the movement of the movable plate 3 is controlled by controlling the position or posture of the arm 4 and the rod 7 .
[0027] The arm 4 is connected to the main shaft of the motor 5 built in the fixed plate 2 . The flange surface of the motor 5 is fixed to the plate 6 , thereby fixing the motor 5 to the fixed plate 2 . Plate 6 is fixed on fixed plate 2 . The motor 5 includes an encoder 5 a as a joint angle detection mechanism. The angle of the arm part 4 can be detected by using the encoder 5a. The motor 5 is an example of a power source of the parallel link robot 100 . exist figure 1 In the figure, only one motor 5 is shown in ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com