

Target assignment method used in cooperative search of multi-unmanned aerial vehicles with communication restriction
A target allocation, multi-UAV technology, applied in the field of cooperative control and communication, can solve the problem of not considering the impact of communication constraints target allocation and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
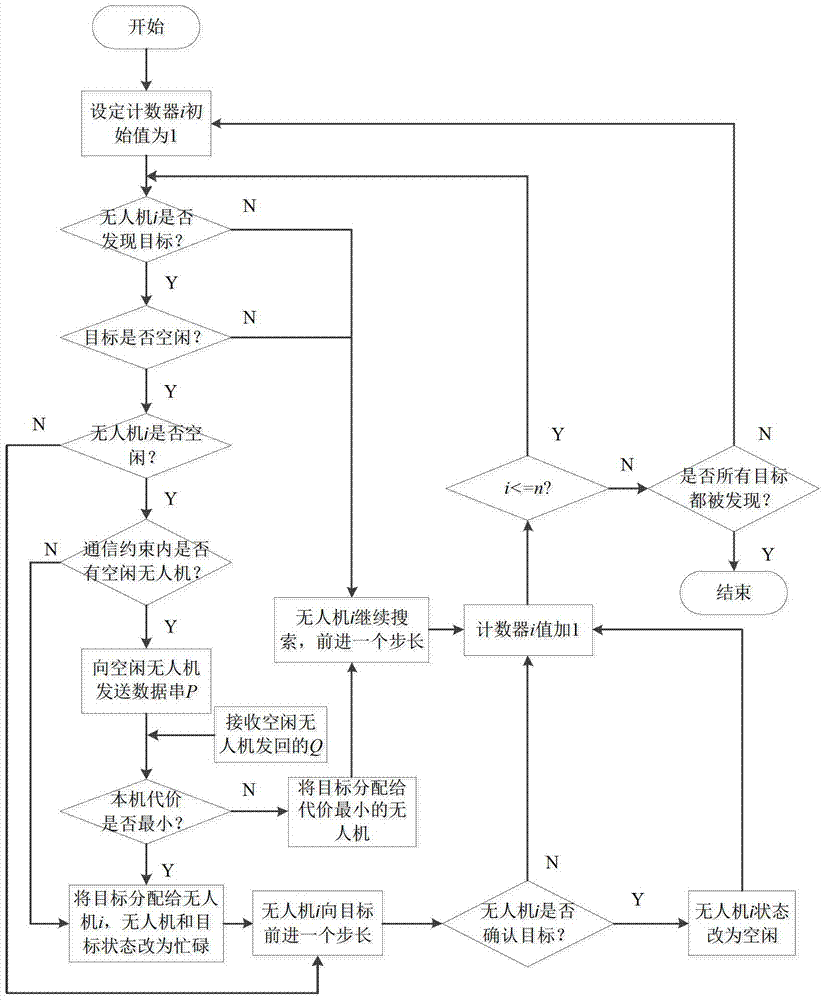
[0046] The present invention comprises the following steps:
[0047] Assuming that the step size of the algorithm is t, the types of multi-UAVs participating in the task are the same, the flying speed is the same and kept constant as v, and the minimum turning radius is R min . The steps performed by the algorithm are as follows (see attached figure 1 ):
[0048] Step 1: Set the number and initial position of the UAV and the target, the maximum detection distance of the UAV, the communication distance, the communication angle and the number of discovered targets, and set the initial state of the UAV and the target to be idle.
[0049] The initial position of the UAV is (x i ,y i )(i=1,2,…,n), where n is the number of drones;
[0050] The position of the target is (x j ,y j )(j=1,2,...,m), where m is the number of targets;
[0051] The maximum d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More