

An obstacle-surpassing carrying robot
A robot and obstacle-crossing technology, applied in the field of robotics, can solve problems affecting the stability of vehicles, and achieve the effect of improving obstacle-crossing ability and high obstacle-crossing performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The technical solution of the present invention will be described in detail below with reference to the drawings and embodiments.
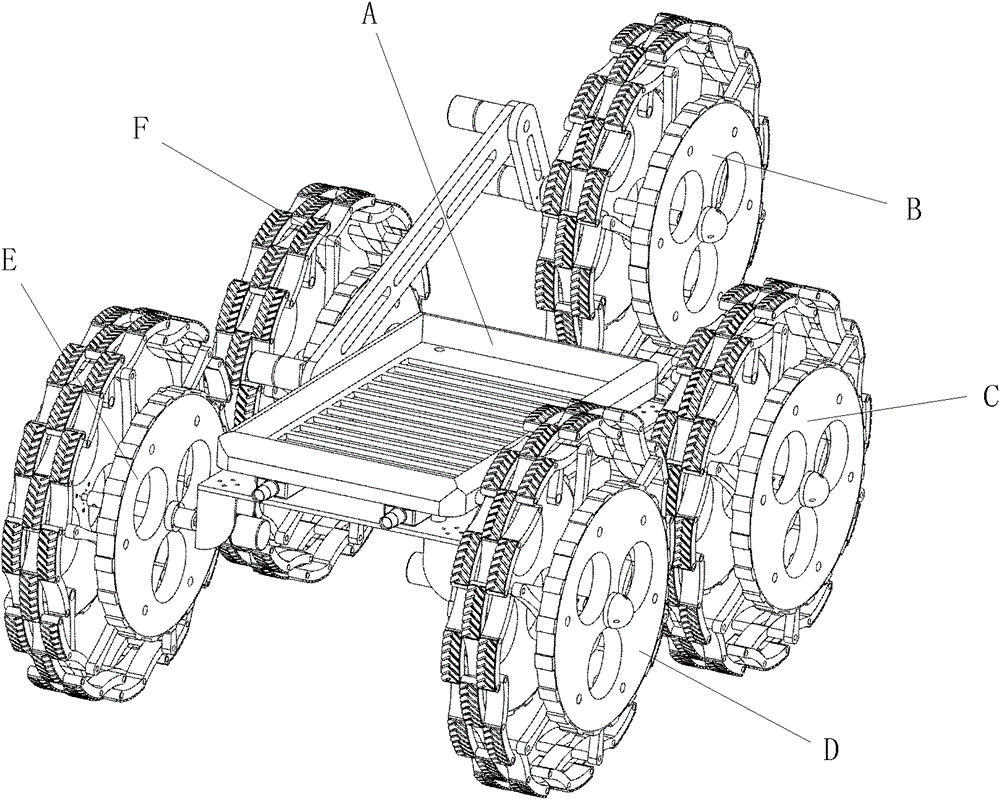
[0028] Such as figure 1 As shown, an obstacle-surmounting carrier robot includes a car body A and first to fifth obstacle-breaking wheels B, C, D, E, and F arranged on the car body A. The first to fifth obstacle-crossing wheels B, C, D, E, F are exactly the same, the first obstacle-crossing wheel B is installed on the second mechanical arm A-f, and the second to fifth obstacle-crossing wheels C, D, E, F Mounted at the four vertices of chassis A-d. The first to fifth obstacle-crossing wheels B, C, D, E, and F realize the deformation of the outer contour of the wheel and the forward, backward, and differential steering of the robot by an independent drive system inside the wheel. The car body A is provided with first and second mechanical arms A-e and A-f, and the first and second mechanical arms A-e and A-f are driven by two third motors A...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More