

Deformed caterpillar robot
A crawler robot and crawler technology, applied in tracked vehicles, motor vehicles, transportation and packaging, etc., can solve the problems of flexibility, maneuverability and ability limitations of climbing obstacles, limited shock absorption effect, poor motion stability, etc. Achieve the effects of improving obstacle-surpassing ability and motion stability, good shock absorption, and improving deformation ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
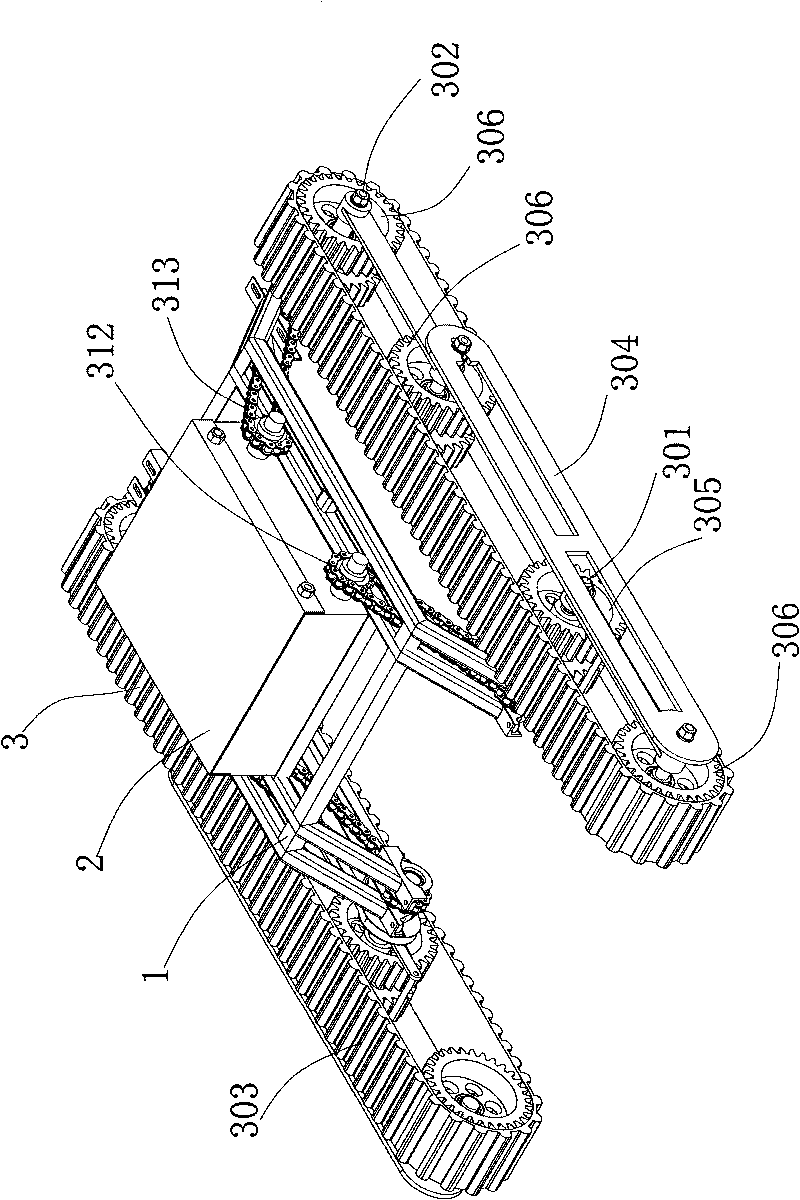
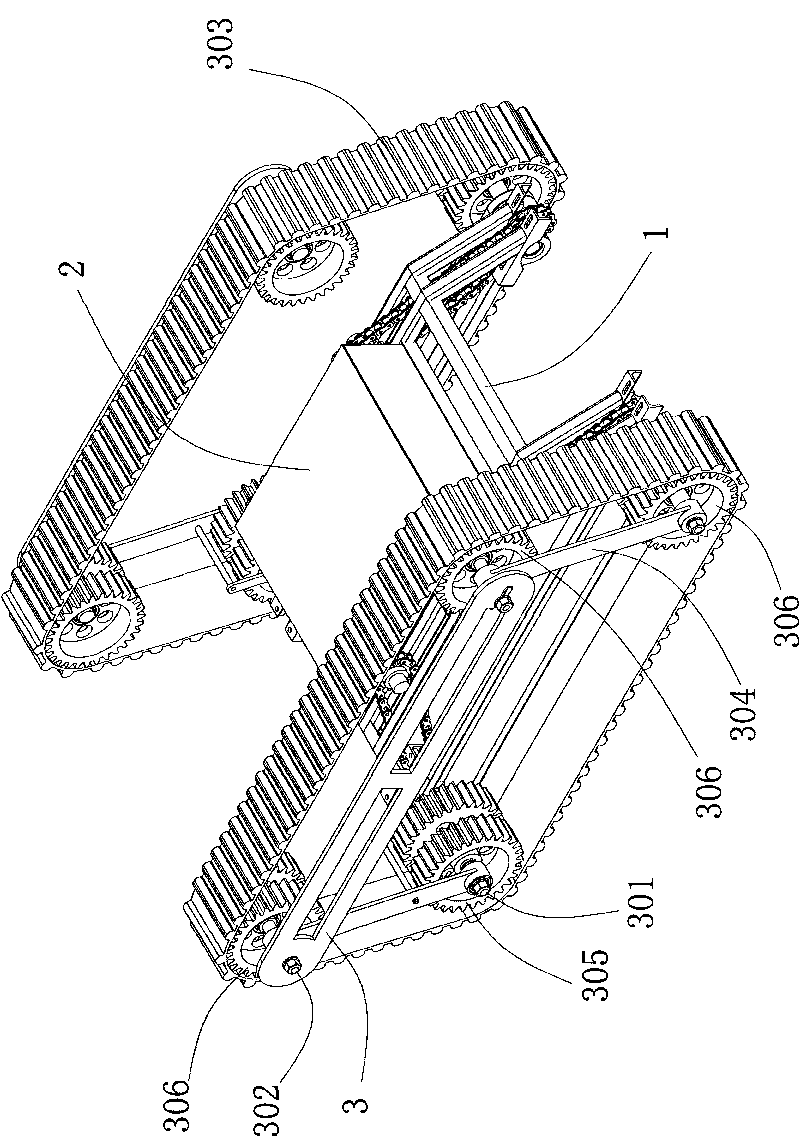
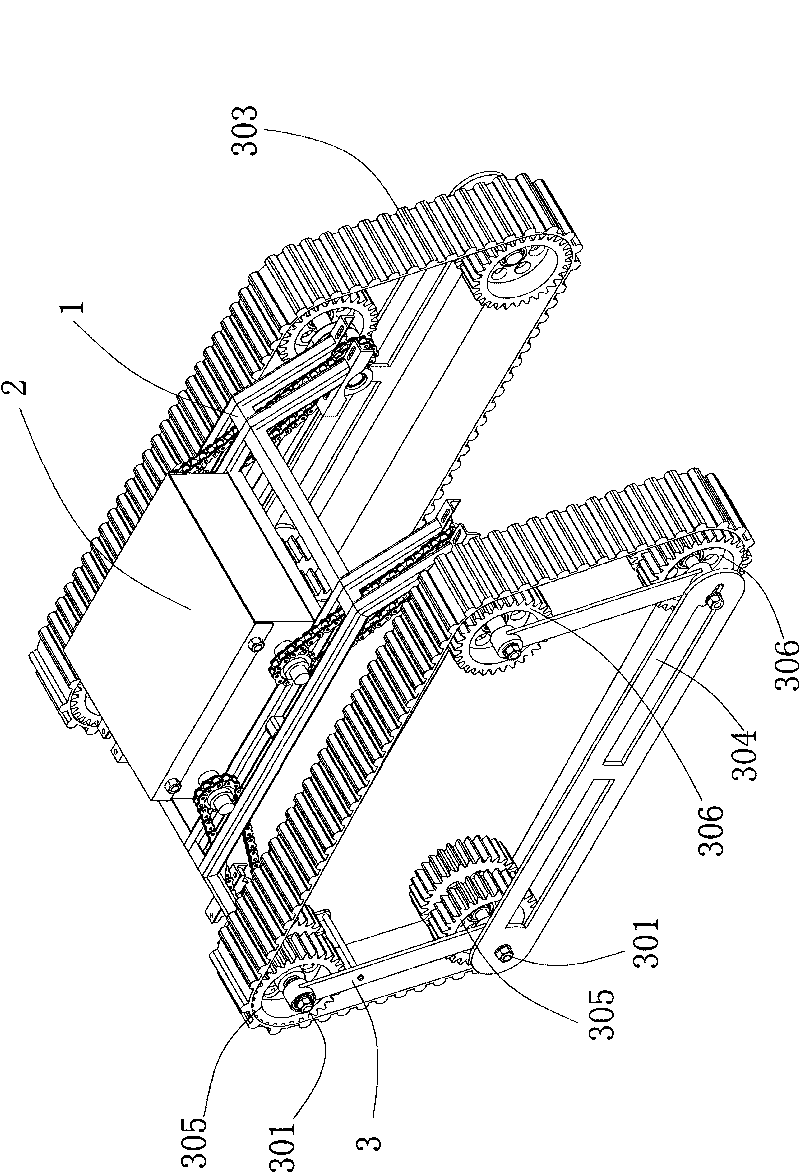
[0045] like Figure 1 to Figure 11As shown, the deformed crawler robot of the present invention includes a frame 1 and a fuselage 2 mounted on the frame 1, and a set of deformed crawler running mechanism 3 is respectively installed on both sides of the frame 1, and the deformed crawler running mechanism 3 includes a driving shaft 301, crawler belt deformation drive shaft 302, crawler belt 303 and deformation swing link mechanism 304, the travel drive shaft 301 and track deformation drive shaft 302 are arranged in parallel on the frame 1, one end of the deformation swing link mechanism 304 is affixed to the crawler belt deformation drive shaft 302, The other end is supported on the travel drive shaft 301 via a bearing, the drive drive shaft 301 is provided with a driving track wheel 305, the track deformation drive shaft 302 and the deformation pendulum mechanism 304 are equipped with a driven track wheel 306, and the drive track wheel 305 And each driven track wheel 306 is eng...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More