

Extended target probability hypothesis density filtering method based on cubature Kalman filtering
A technology of probability hypothesis density and Kalman filtering, which is applied to instruments, character and pattern recognition, computer components, etc., can solve problems that are difficult to solve, non-linear function Jacobian matrix does not exist, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
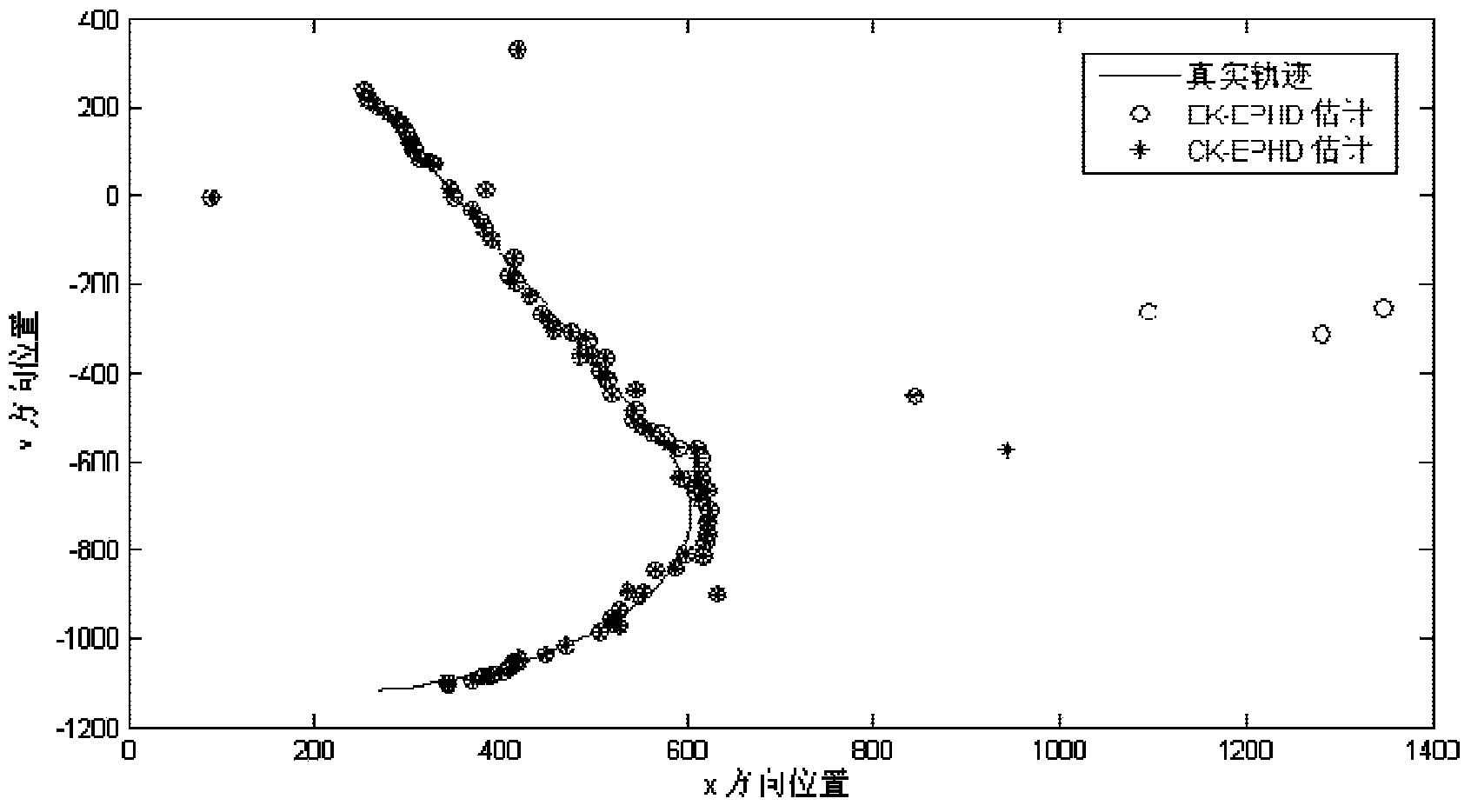
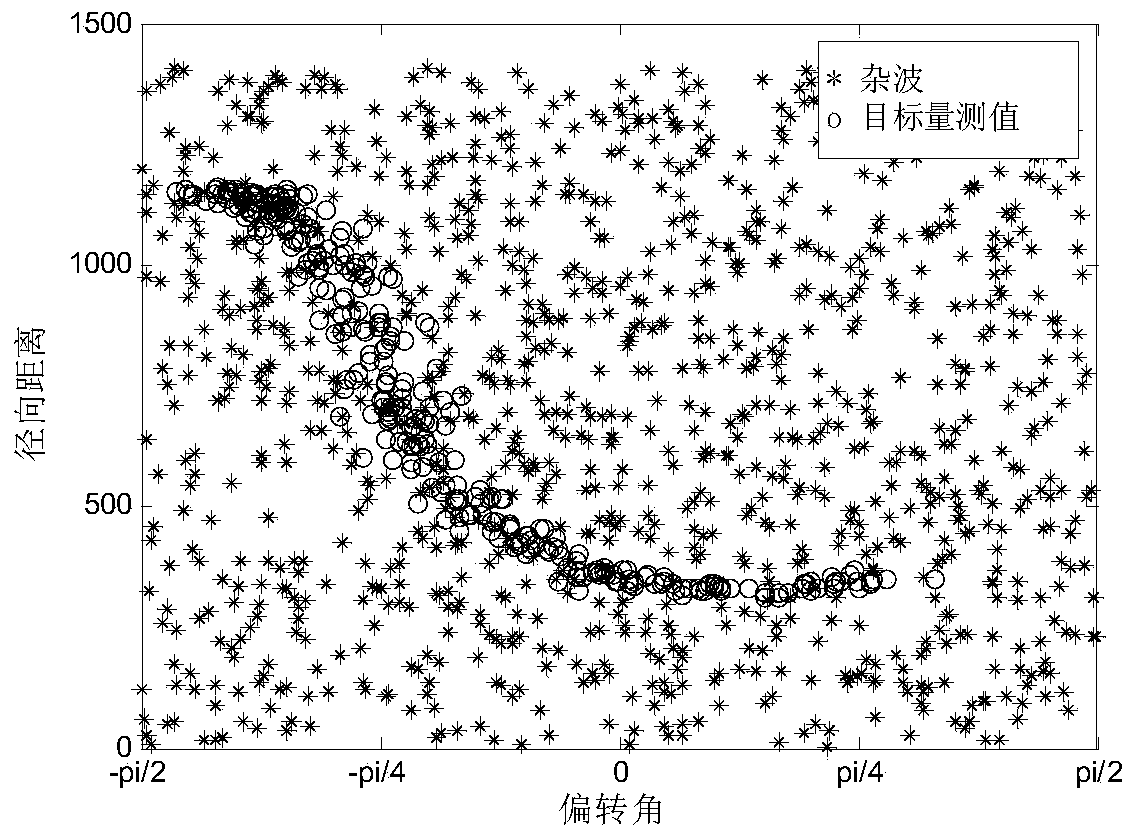
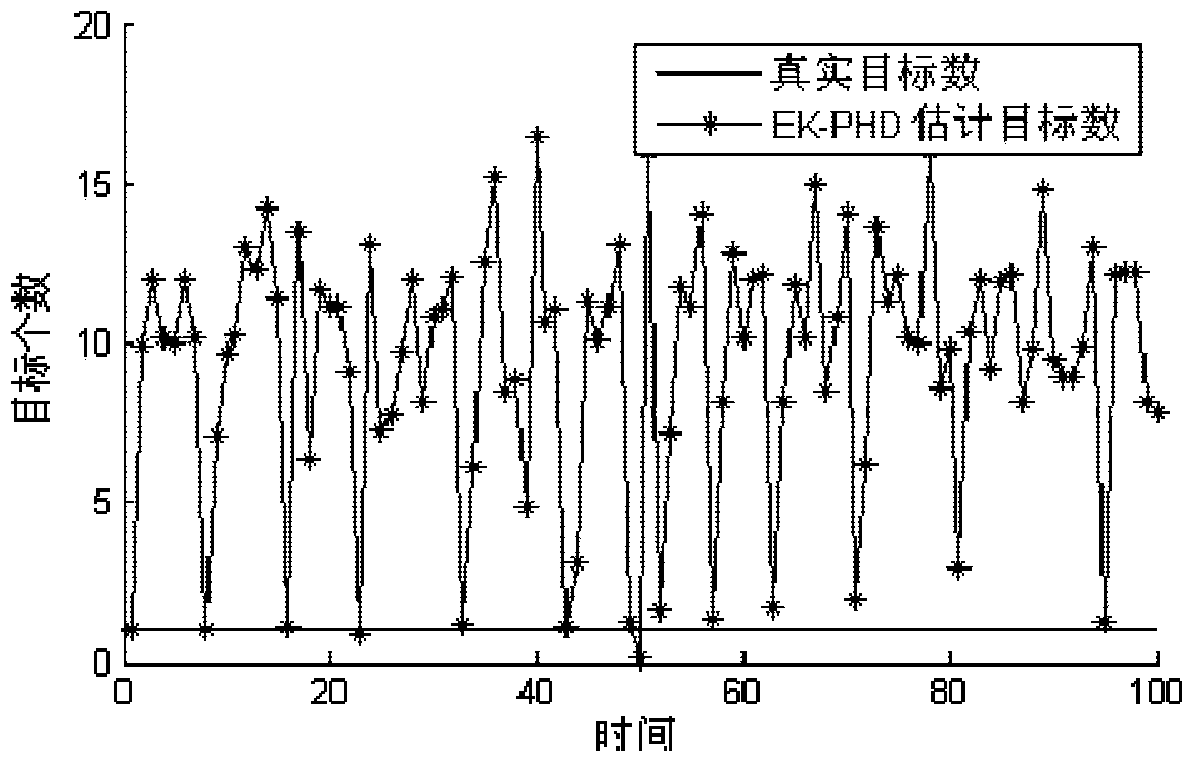
[0198] Example 1: Tracking experiment of a single extended target
[0199] The state transition equation and measurement equation of the preset target are respectively:
[0200] x k =F k x k-1 +G k ν k (33);
[0201] z k = [ arctan ( y k / x k ) x k 2 + y k 2 ] T + w k - - - ( 34 ) ;
[0202] In f...
Embodiment 2
[0219] Tracking of Multiple Extended Targets
[0220] The state transition equation and measurement equation of the target are the same as in Embodiment 1, and the parameter settings are also the same;
[0221] It is set that there are 3 targets in the entire simulation area, target 1 appears at time k=1 and dies at time k=100; target 2 appears at time k=11 and dies at time k=100; target 3 occurs at time k=66 Appears and dies at k=100 time; target 1 and target 2 both move at a constant speed, and target 3 makes a turning motion;
[0222] Let the PHD of the random set of newborn targets be:
[0223] γ k ( x ) = 0.1 N ( x ; m γ ( 1 ) , P γ ) ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More