

A super-short-range visual servo control method for a space tethered robot
A technology of robot vision and space tethering, which is applied in the direction of program control, general control system, program control manipulator, etc. It can solve the problems of short baseline distance of measurement camera, difficulty in target measurement, and small overlapping area of binocular vision.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
[0028] The embodiments of the present invention are realized through the following technical solutions.
[0029] In super close approximation, it is assumed that:
[0030] 1. The sailboard bracket is a single pole type, and the bracket is a thin plate, and the thickness can be ignored;
[0031] 2. The visual measurement system of the space tether robot is a single camera, which is installed at the front end of the operating robot;
[0032] 3. The sailboard support is infinitely long and fills the entire camera field of view, and the position of the straight line on the edge of the support can be obtained through image processing algorithms.
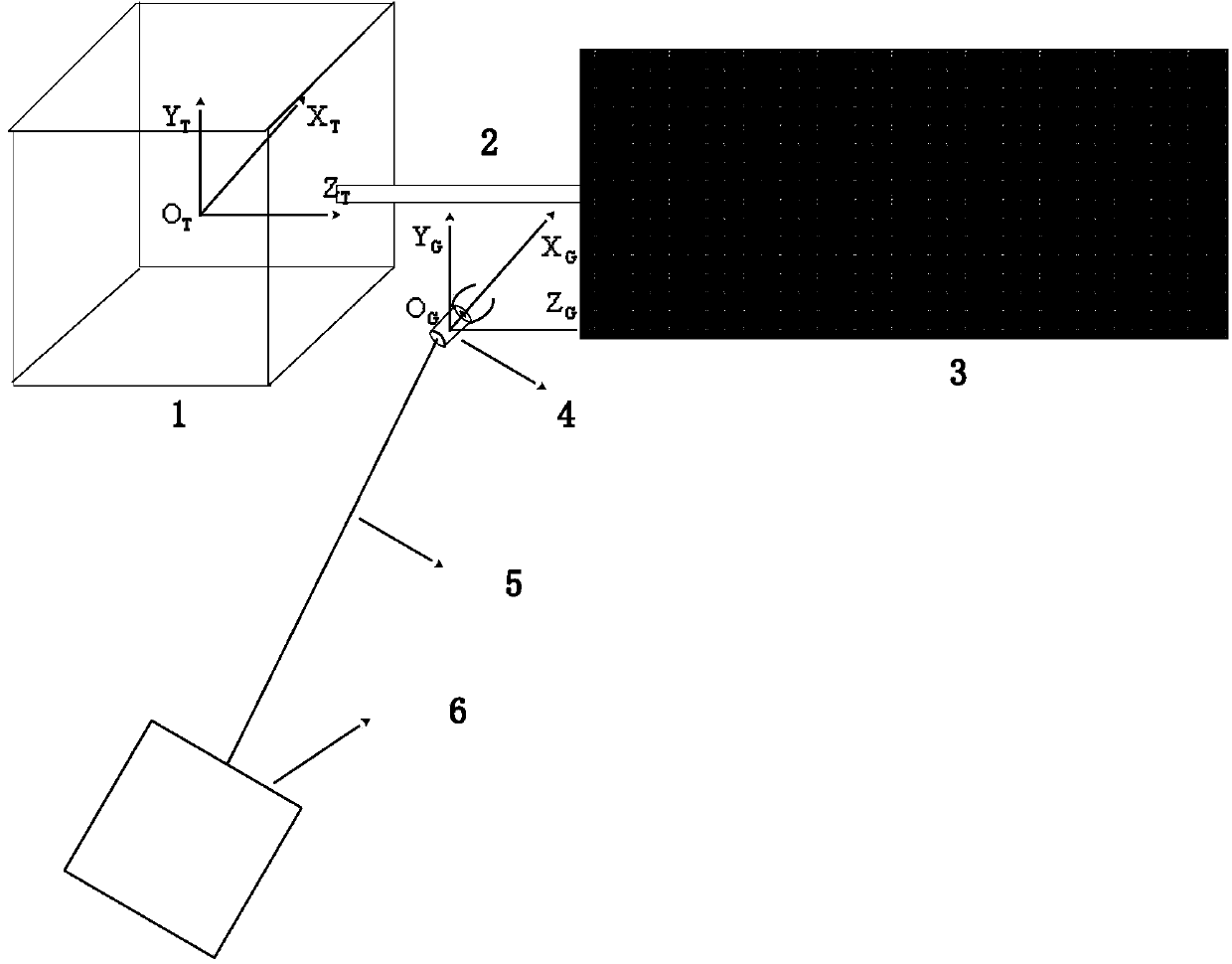
[0033] figure 1 It is a schematic diagram of the ultra-close approach of the space tethered robot: the operating robot 4, the space tether 5 and the space platform 6 together form the space tethered robot. In the ultra-s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More