

Robot controller and robot system
A robot and controller technology, applied in the direction of program control manipulator, electrical program control, comprehensive factory control, etc., can solve the problems of insufficient synchronization accuracy and cannot be further improved
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] Embodiments of the robot controller and the robot system disclosed herein will be described below with reference to the accompanying drawings. It is to be noted that the embodiments are not limited to those described below.
[0026] In the description below, each of a plurality of components of the same type is assigned a symbol with a suffix in the form of a numeral followed by a hyphen. However, when these components are described as a whole, they are described by using only the symbol without using a suffix in the form of a numeral followed by a hyphen in some cases.
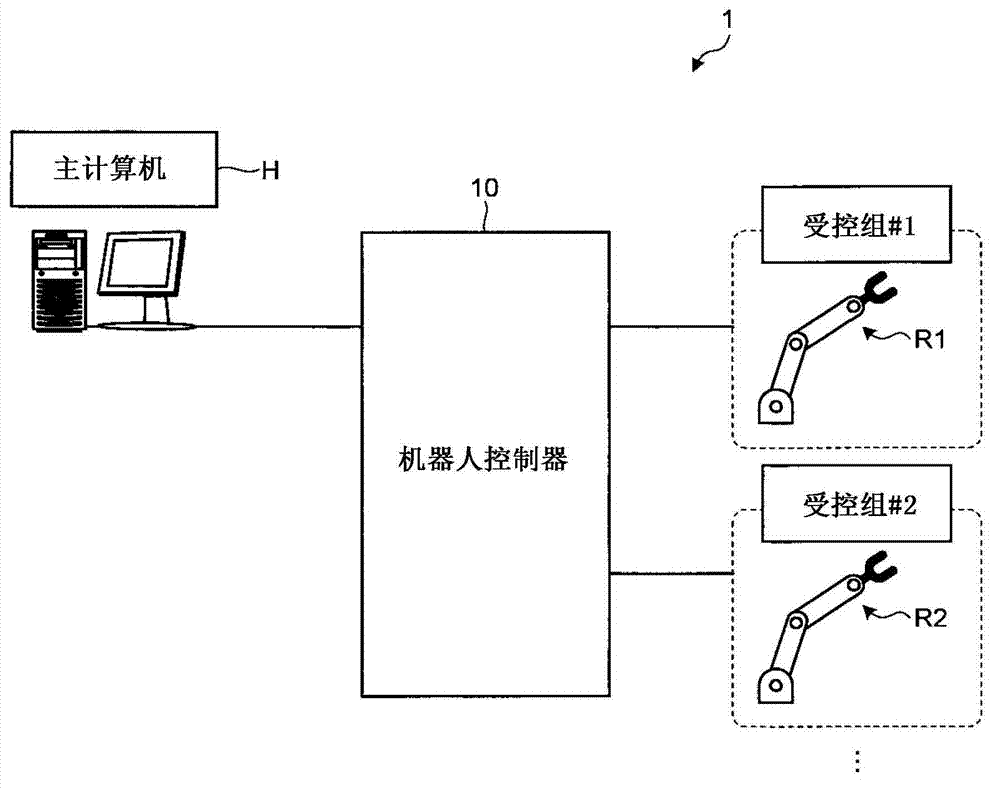
[0027] First, will use figure 1 An example of the overall configuration of the robot system 1 will be described. figure 1 is a diagram showing an example of the overall configuration of the robot system 1 according to the embodiment.
[0028] like figure 1 As shown, the robot system 1 is provided with a host computer H, a robot controller 10 and a plurality of controlled groups. The host computer ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More