Multi-freedom-degree minimally-invasive-surgery instrument-holding arm structure
A minimally invasive surgery, degree of freedom technology, used in surgery, medical science, diagnosis, etc., can solve the problems of system reliability, safety, and operability that cannot meet the requirements of surgery, and achieve strong intuitive movement and accurate positioning. , the effect of a large working range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] Hereinafter, the present invention will be described in more detail with examples in conjunction with the accompanying drawings:
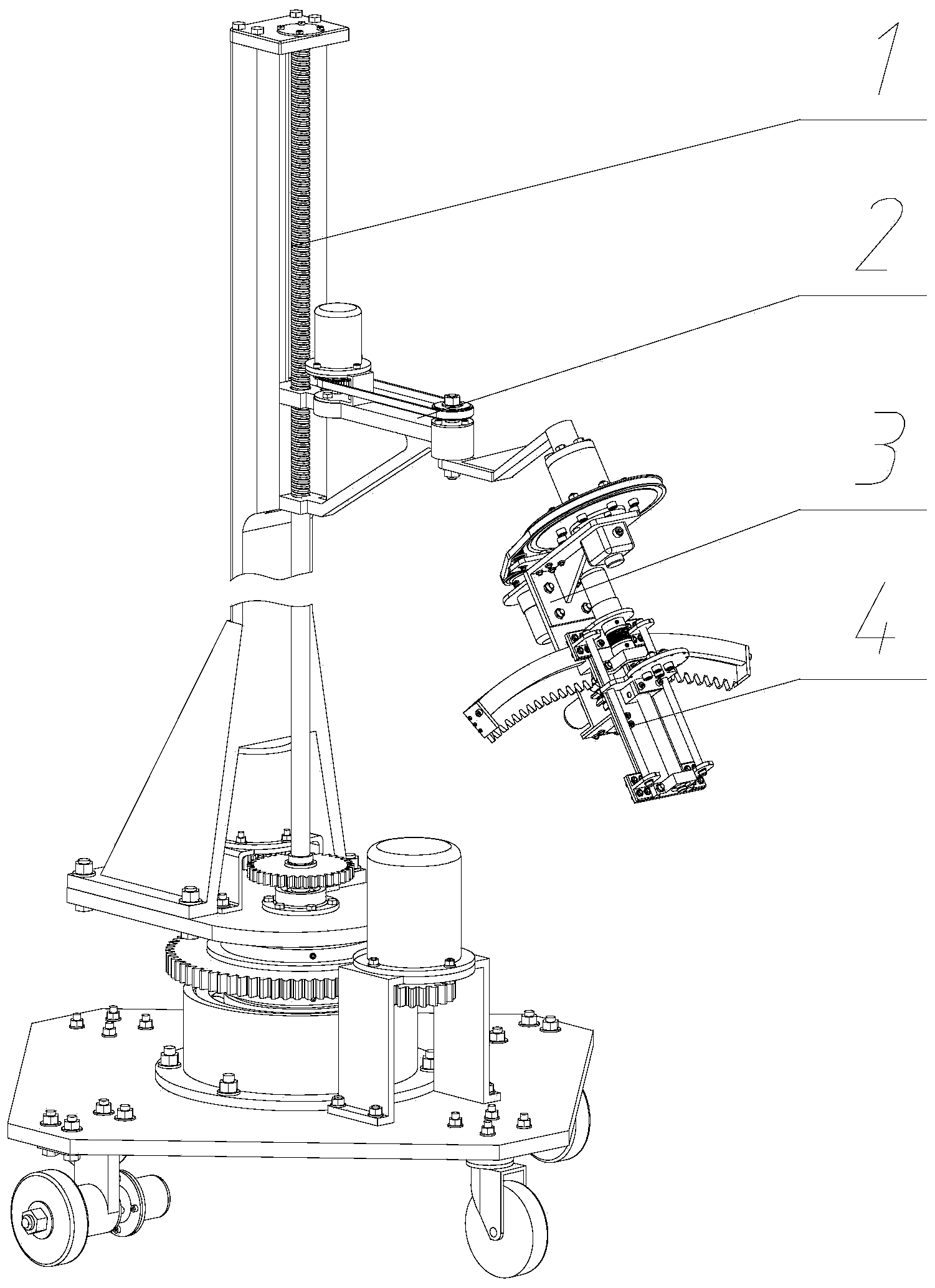
[0022] Combine Figure 1~6 , The present invention is mainly composed of a moving support mechanism 1, an arm rotating joint 2, a wrist rotating joint 3, and a sliding rail mechanism 4.
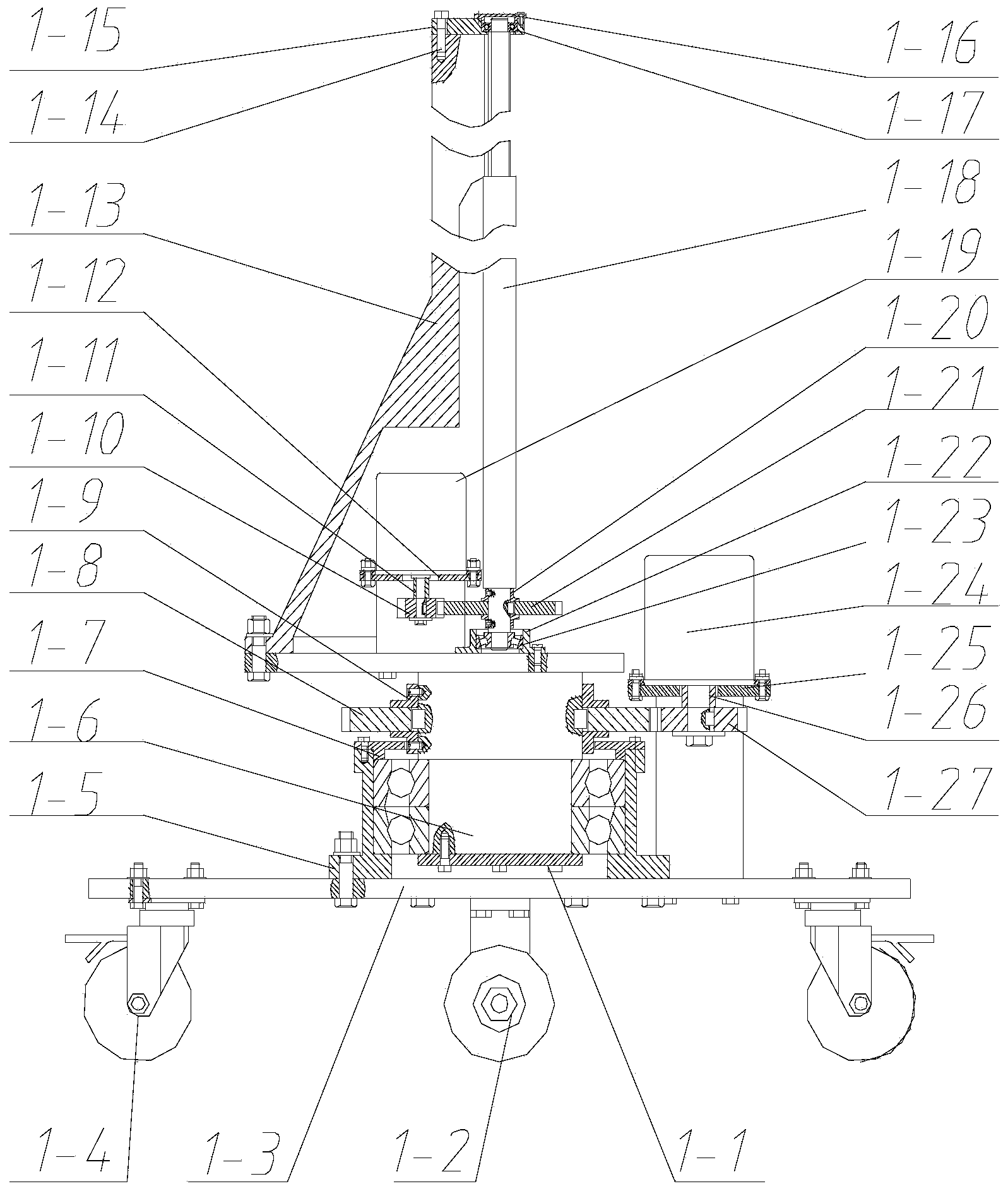
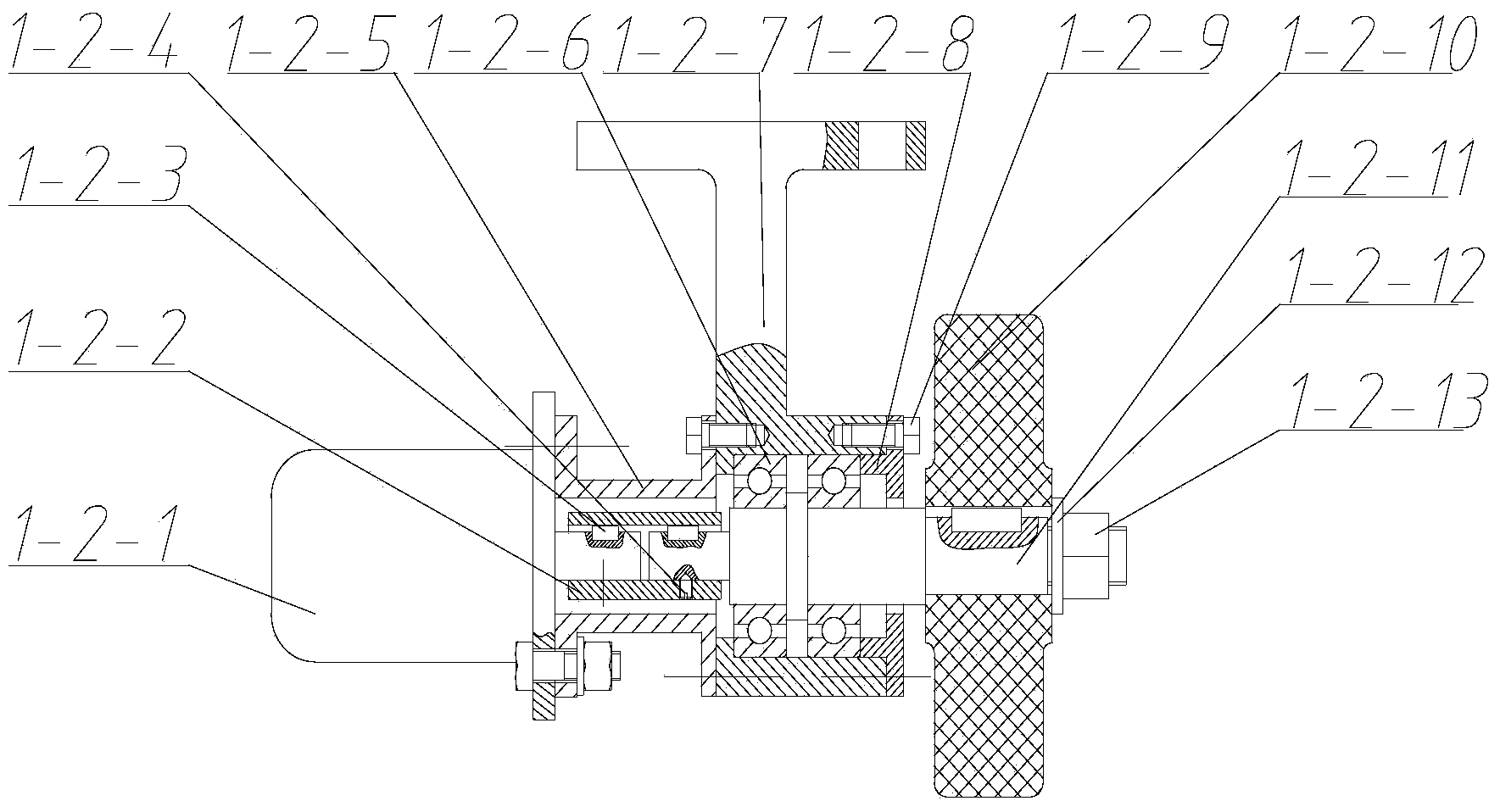
[0023] The mobile support mechanism 1 is composed of shaft end stop plate 1-1, drive wheel 1-2, bottom plate 1-3, brake universal wheel 1-4, bearing bottom cover 1-5, wheel shaft 1-6, bearing end cover 1- 7. Big gear 1-8, gear fixing sleeve 1-9, small gear 1-10, sleeve 1-11, motor bracket 1-12, column 1-13, screw 1-14, top cover 1-15, Bearing end cover 1-16, deep groove ball bearing 1-17, screw 1-18, motor 1-19, gear fixed sleeve 1-20, large gear 1-21, bearing seat 1-22, tapered roller bearing 1-23. Motor 1-24, sleeve 1-25, motor bracket 1-26, pinion 1-27; arm rotation joint 2 is composed of slider 2-1, synchronous belt wheel 2-2, motor bracket 2- 3. Motor 2-4...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More