Method for establishing universal mechanical model of tethered space robot
A technology of dynamic model and space tether, which is applied in the field of establishing general dynamic model and can solve the problems of large dynamic modeling workload of space tethered robot and so on.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0059] The present invention will be further described in detail below in conjunction with specific embodiments, which are explanations of the present invention rather than limitations.
[0060] The invention relates to a method for establishing a general dynamics model of a space tethered robot, which establishes a general dynamics model for the space tethered robot, which is a complex rigid-flexible composite system, and lays a foundation for the research of the space tethered robot.
[0061] The present invention is specifically realized through the following steps:
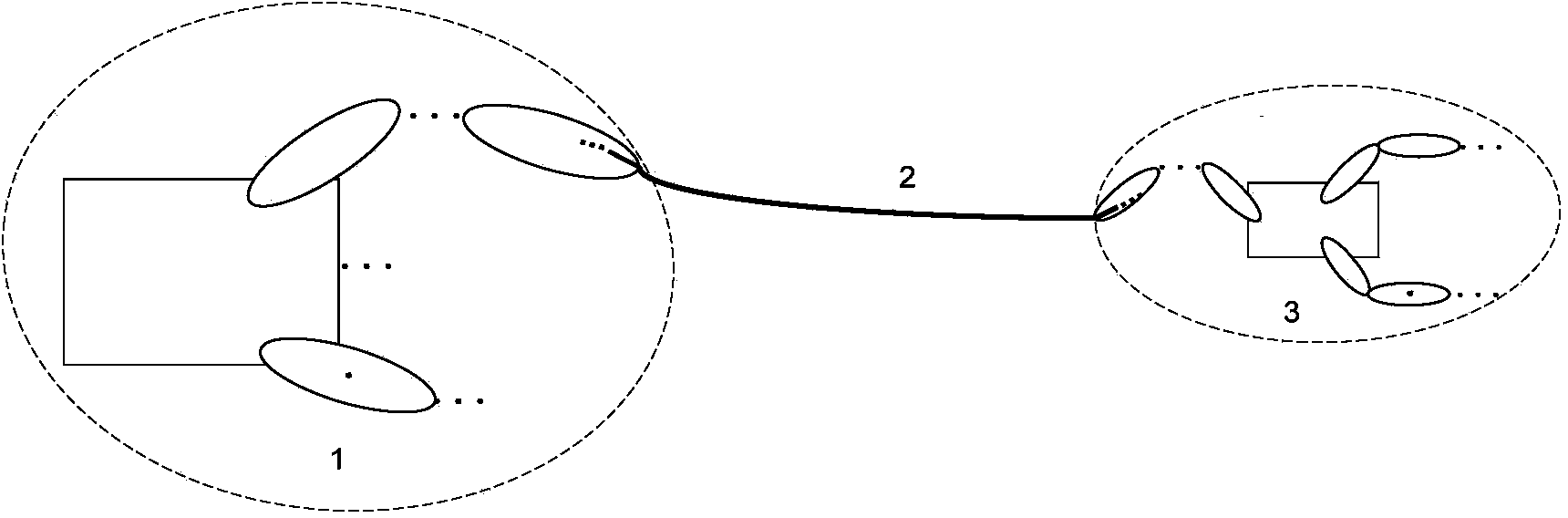
[0062] Step 1, determine the topology and structural parameters of the space tethered robot.
[0063] Such as figure 1 As shown, the space tethered robot adopts a general topology. Both the space platform 1 and the operating robot 3 are multi-rigid body structures. Define the geocentric inertial coordinate system OX ω Y ω Z ω . space platform 1 by n P It is formed by connecting rigid bodies, and the ce...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More