

Middle-distance and long-distance approximate position estimation method of space tethered robot
A technology of space tethering, robotics, applied in the field of spacecraft navigation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] Describe the present invention below in conjunction with specific embodiment:
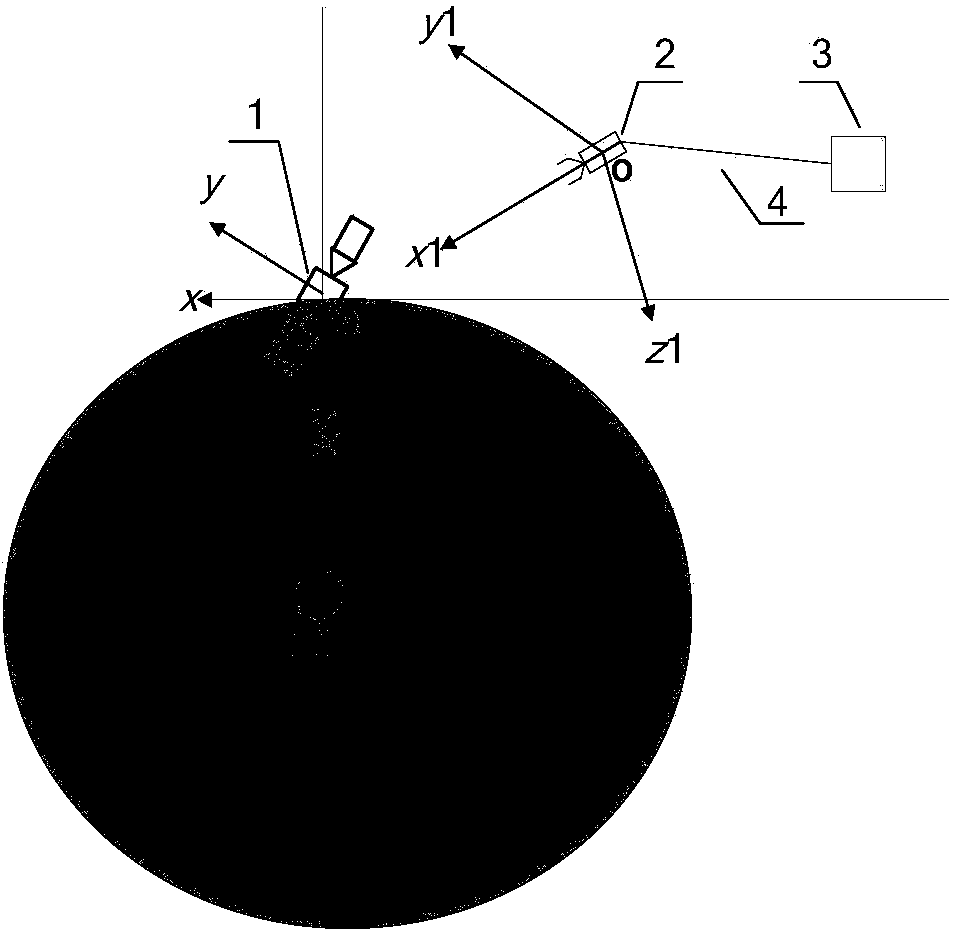
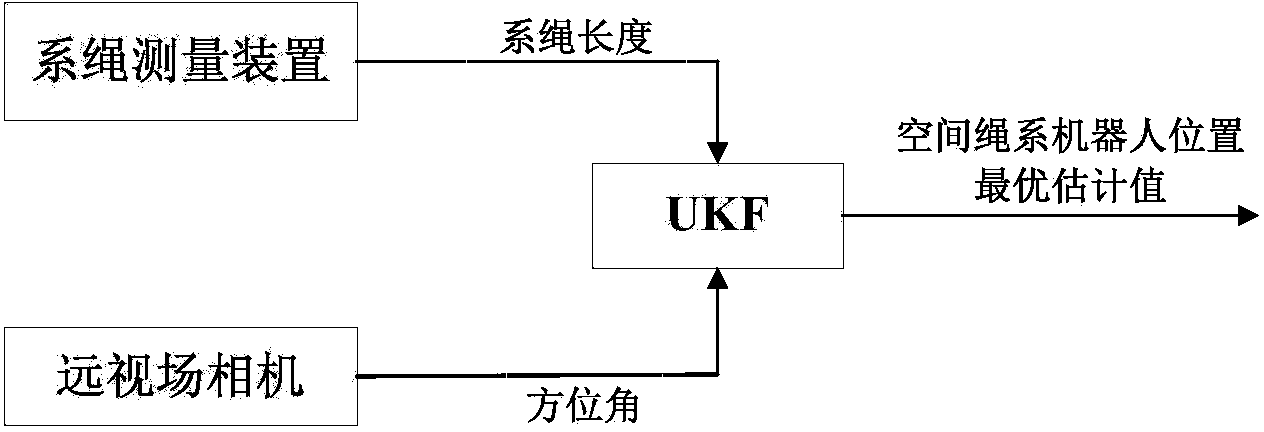
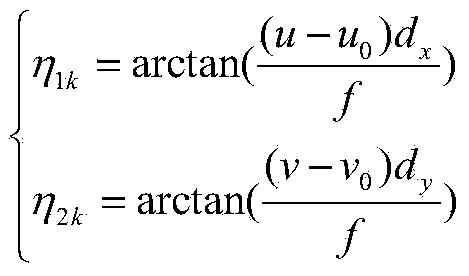
[0031] In this embodiment, aiming at the navigation problem in the process of the space tethered robot approaching the target, a mid-to-long distance space tethered robot position estimation method of "monocular vision measurement + tether length measurement" is designed, and the camera is used to measure the target azimuth angle, combined with the space The tether length information of the tethered robot is used to estimate the position of the tethered robot in space using the UKF filter algorithm.
[0032] Measuring device: The camera for target azimuth measurement needs to use a camera with a narrow field of view, so as to ensure a more accurate azimuth measurement of the target at a medium or long distance from the target. The tether release mechanism of the space tethered robot needs to have a tether length measuring device, which can provide real-time tether length information.
[003...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More