

Transformer substation inspection robot indoor positioning method based on information fusion
An inspection robot and indoor positioning technology, which is applied in the direction of instruments, electromagnetic radiation induction, computer components, etc., can solve the problems of accumulation and lack of visual positioning, and achieve the effects of strong pertinence, fast convergence, and accurate pose information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
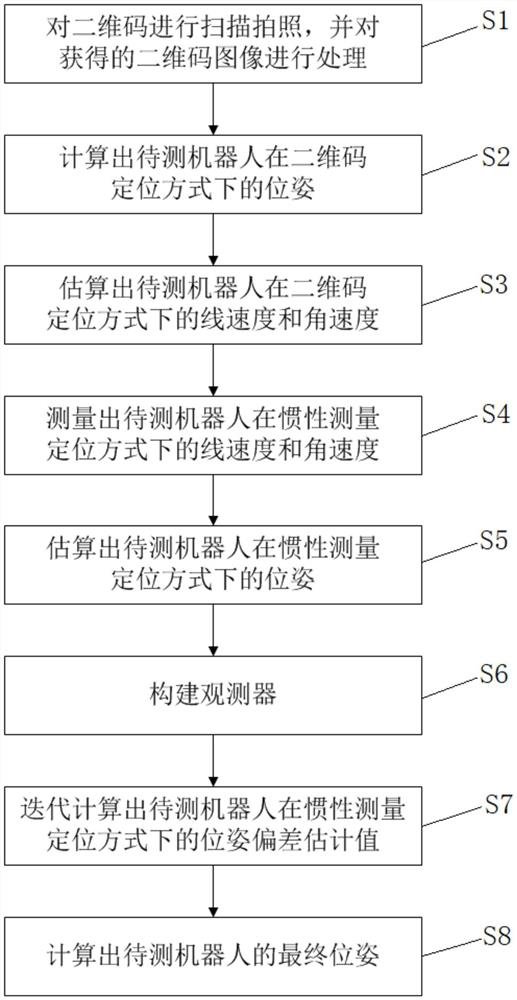
[0046] Such as figure 1 As shown, an indoor positioning method for a substation inspection robot based on information fusion includes the following steps:
[0047] S1. Use the camera installed in the center of the robot to be tested to scan and take pictures of the two-dimensional code, and process the obtained two-dimensional code image, specifically including:
[0048] S11. Perform grayscale processing on the obtained two-dimensional code image to obtain a grayscale image.
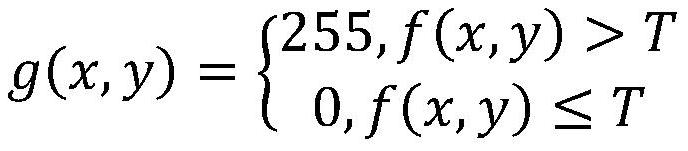
[0049] S12. Perform binarization processing on the obtained grayscale image, that is, change the grayscale values of all pixels in the grayscale image to 0 (black) or 255 (white), to obtain a binarized image.
[0050] In order to obtain ideal results, it is necessary to determine a threshold to distinguish and classify the gray value of the pixels in the grayscale i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More