

Grayscale sensor and tracking control method based on grayscale sensor
A grayscale sensor and grayscale technology, applied in the direction of two-dimensional position/channel control, etc., can solve problems such as troublesome adjustment, deviation of grayscale contrast value, error-prone robots, etc., and achieve simple adjustment and accurate grayscale contrast value Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] Further description will be given below in conjunction with the accompanying drawings and preferred embodiments of the present invention.
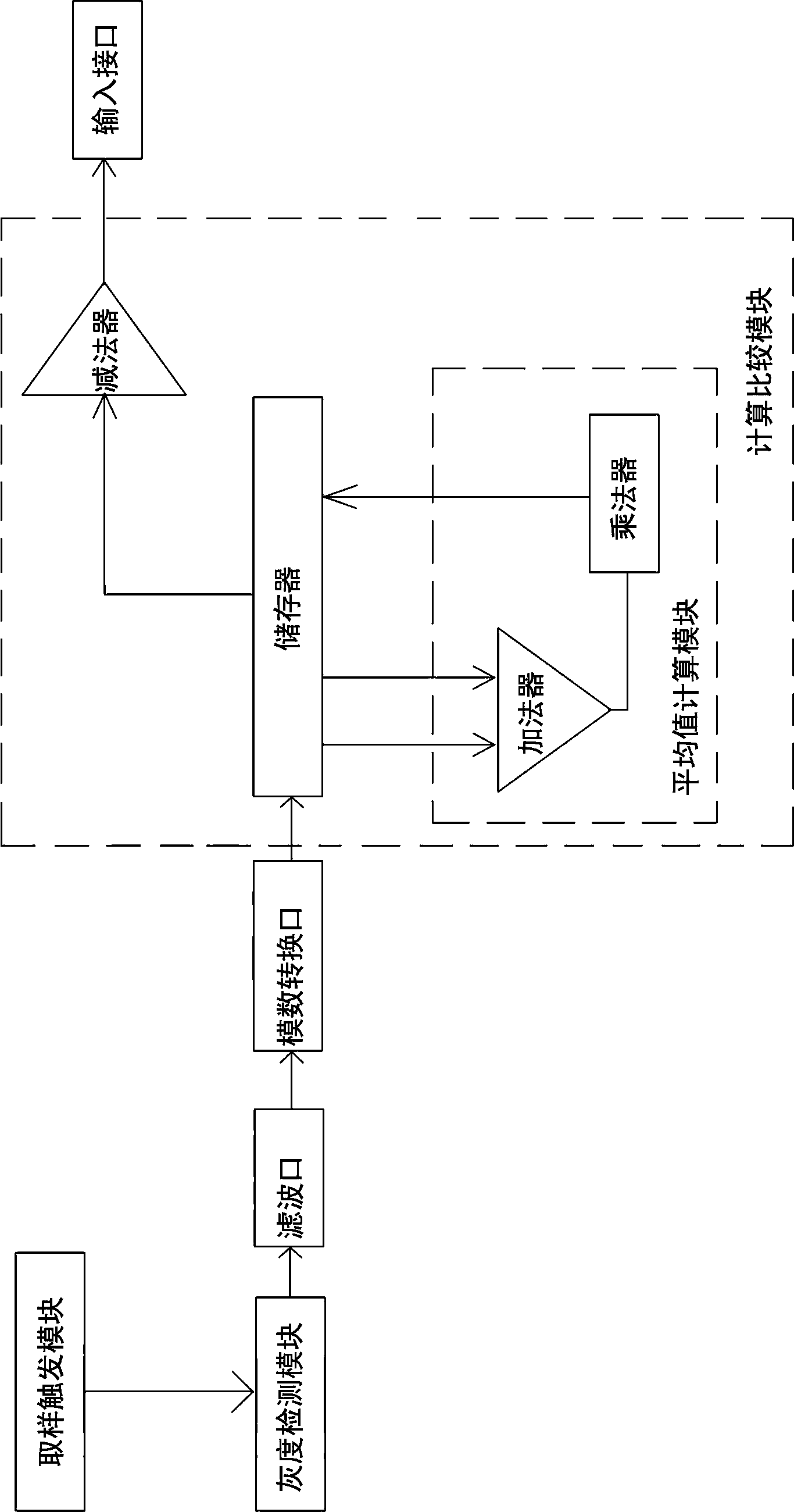
[0037] Such as figure 1 As shown, the grayscale sensor that automatically calculates the grayscale average value includes a grayscale detection module 1, a sampling trigger module 2, a filter 3, an analog-to-digital converter 4, a calculation and comparison module 5, and an output interface 6; the sampling trigger module The output terminal of 2 is electrically connected with the control terminal of the grayscale detection module 1; the output terminal of the grayscale detection module 1 is electrically connected with the input terminal of the analog-to-digital converter 4 through the filter 3; the output terminal of the analog-to-digital converter 4 is connected with the The input terminal of the calculation and comparison module 5 is electrically connected; the output terminal of the calculation and comparison module 5 is electric...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More