Three-dimensional closed-loop feedback control method for automatic rocket inertia unit target prism collimation
A target prism and control method technology, applied in the field of control, can solve the problems of launch vehicle level, pitch displacement, aiming failure, failure to meet needs, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] An embodiment of a three-dimensional closed-loop feedback control method for automatic alignment of a rocket inertial group target prism according to the present invention will be described in detail below in conjunction with the accompanying drawings.
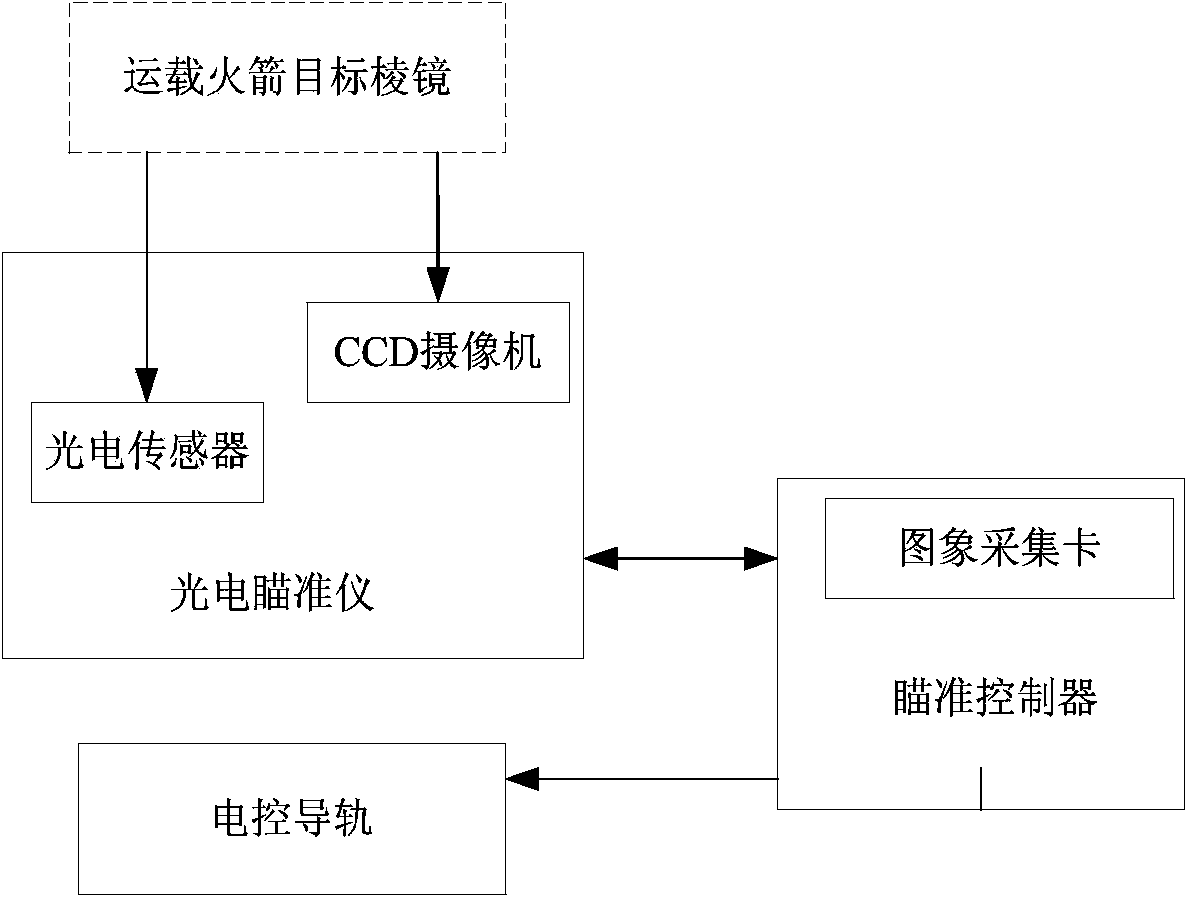
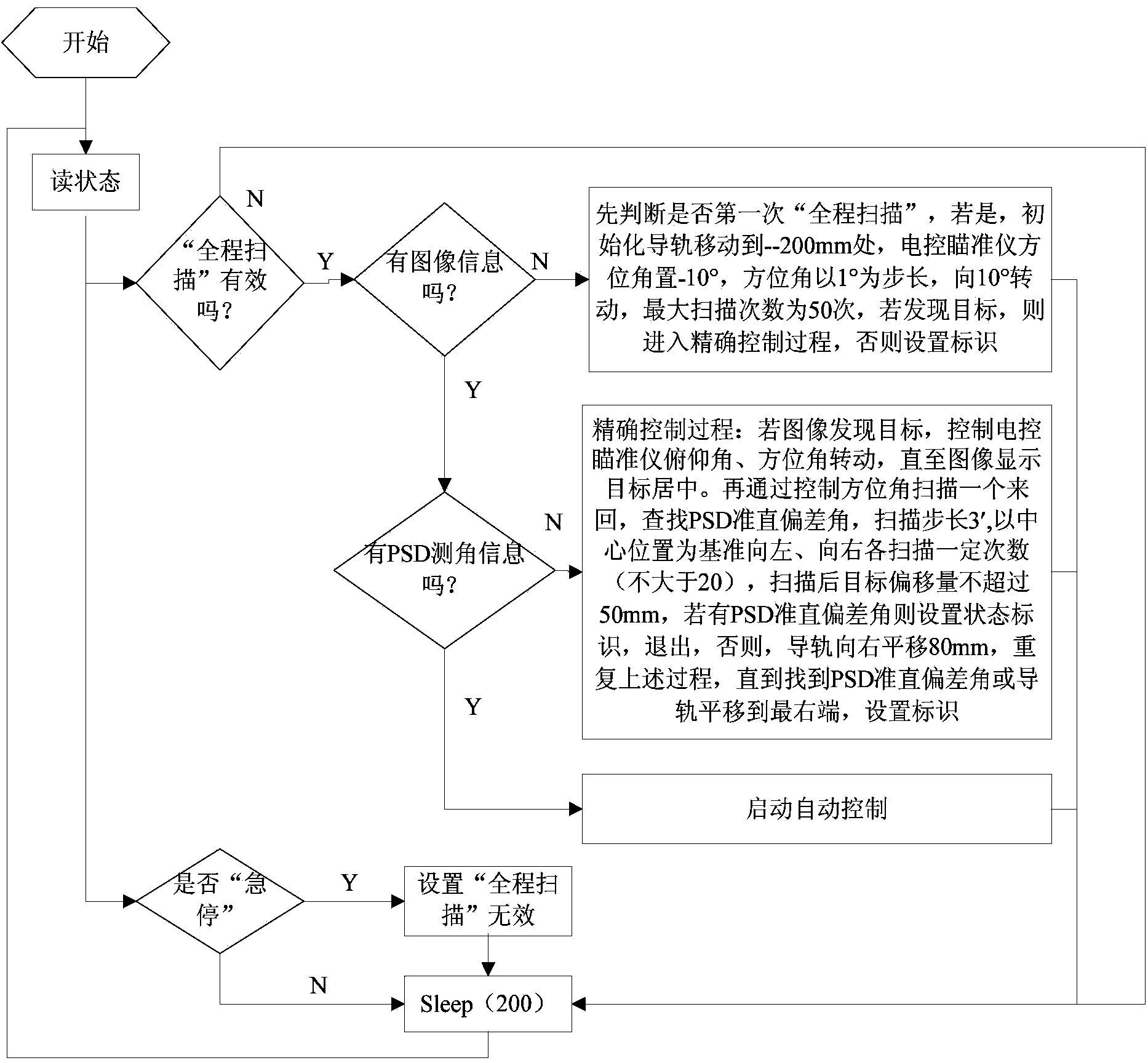
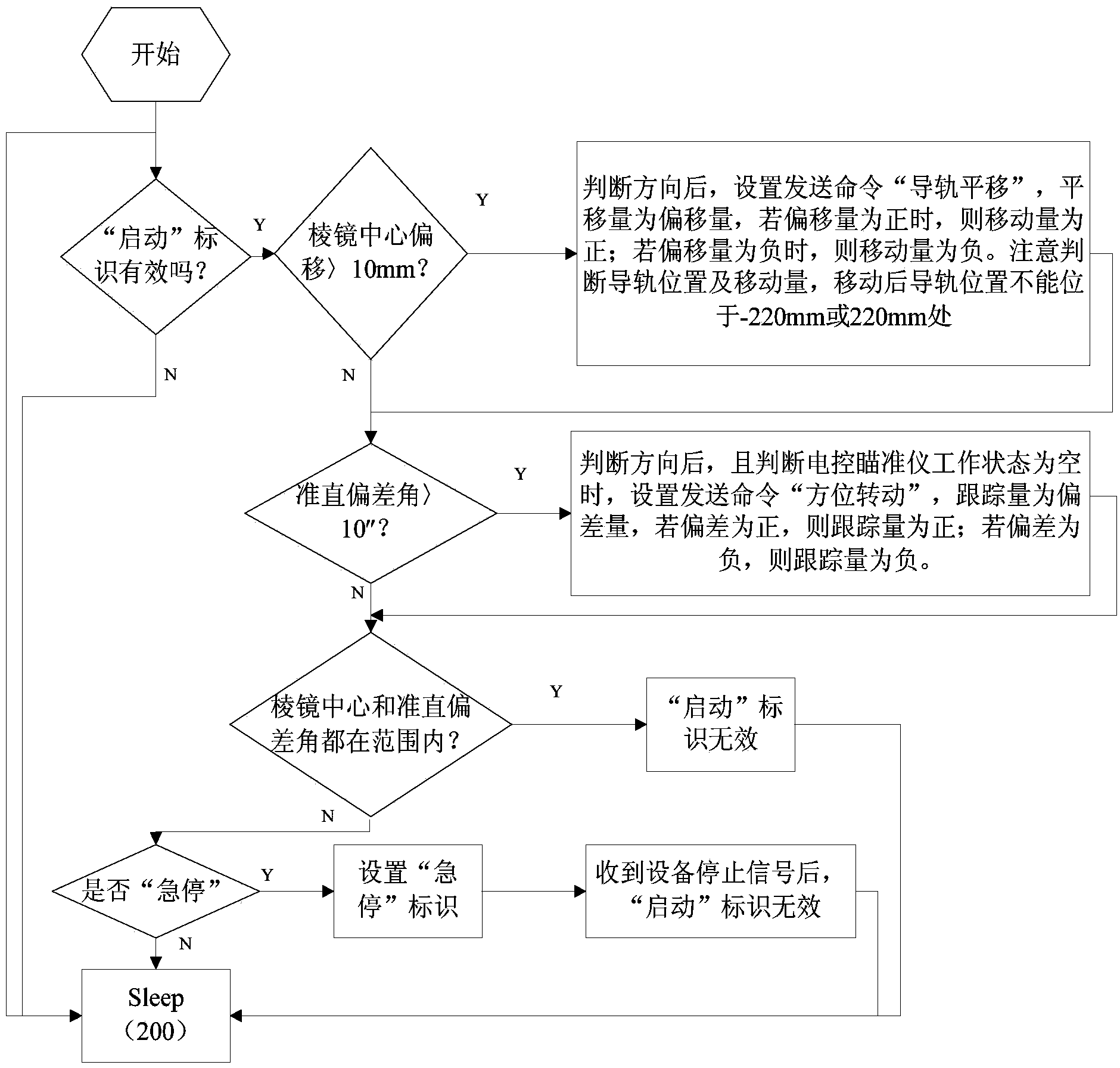
[0056] see figure 1 , in the three-dimensional closed-loop feedback control method of rocket inertial group target prism automatic collimation provided by the present invention, be provided with electronically controlled guide rail, electronically controlled collimator and aiming controller, electronically controlled collimator is provided with photoelectric sensor and CCD camera, aims at The controller includes a frame grabber. The CCD camera is connected with the image acquisition card, and the aiming controller is respectively connected with the electric control collimator and the electric control guide rail. The method is divided into 4 steps, including:
[0057] Step 1, the electronically controlled collimator us...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com