

Planning method and device of robot collision prevention path
A robot and path technology, applied in navigation calculation tools and other directions, can solve problems such as dependence on sampling parameters and discrete collision detection distance parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
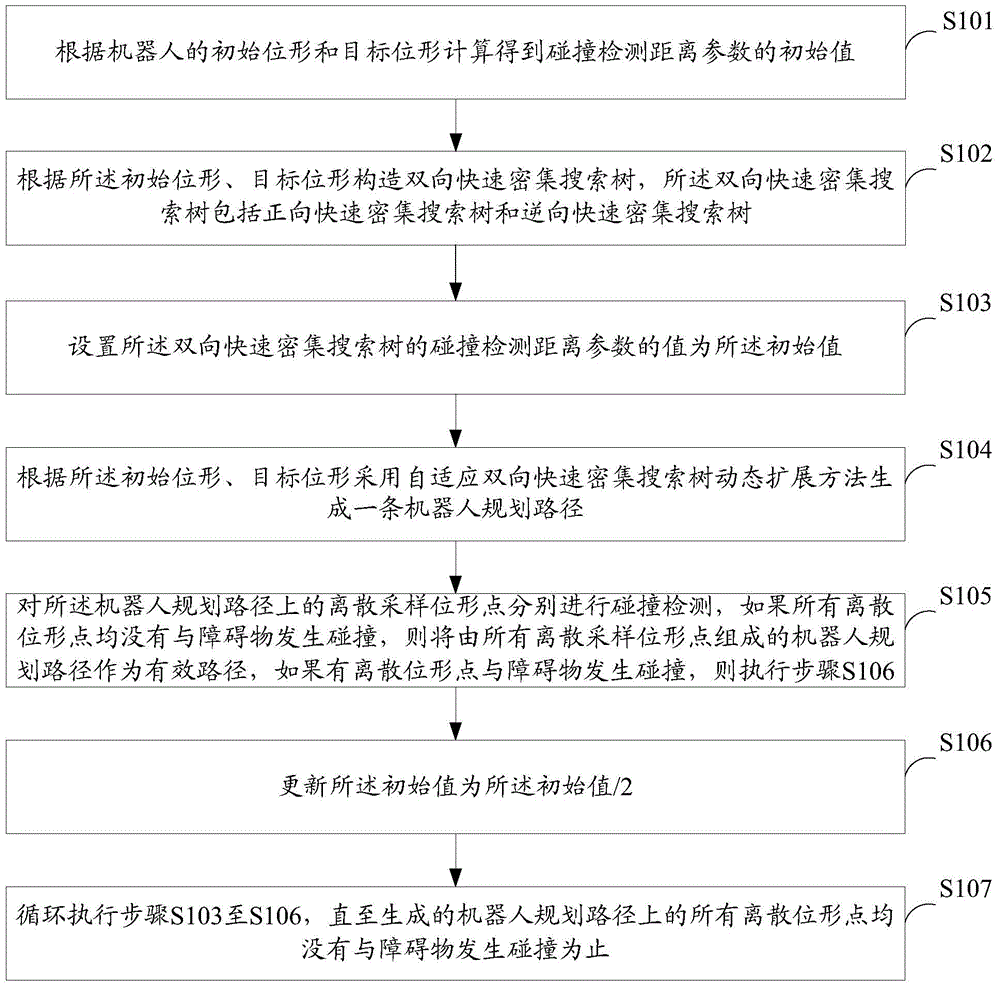
[0065] figure 1 The implementation flow of the planning method for robot collision avoidance path provided by Embodiment 1 of the present invention is shown, and the details are as follows:
[0066] In step S101, according to the initial configuration q of the robot s and the target configuration q g Calculate the initial value r of the collision detection distance parameter col .
[0067] In the embodiment of the present invention, the initial configuration q of the robot is first initialized s and the target configuration q g , and then according to the initial configuration q s and the target configuration q g Calculate the initial value r of the collision detection distance col , where the calculated r col satisfy:
[0068] r col =||q g -q s ||.
[0069] In step S102, according to the initial configuration q s , target configuration q g A bidirectional fast dense search tree is constructed, and the bidirectional fast dense search tree includes a forward fast...
Embodiment 2
[0136] Figure 8 A specific structural block diagram of the robot collision avoidance path planning device provided by Embodiment 2 of the present invention is shown. For the convenience of description, only the parts related to the embodiment of the present invention are shown. The device 8 includes: a collision detection distance initialization unit 41 , a search tree construction unit 42 , a collision detection distance setting unit 43 , a planned path generation unit 44 , a collision detection unit 45 , a collision detection distance update unit 46 and a planned path update unit 47 .
[0137] Among them, the collision detection distance initialization unit 41 is used to s and the target configuration q g Calculate the initial value r of the collision detection distance parameter col ;
[0138] A search tree construction unit 42, configured to s , target configuration q g Constructing a bidirectional fast dense search tree, the bidirectional fast dense search tree comp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More