

Arbitration planning system and method
A planning system and planning technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., to achieve the effect of improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but not as a limitation of the present invention.
[0064] In a preferred embodiment of the present invention, according to the above-mentioned problems in the prior art, an arbitration planning system is now provided.
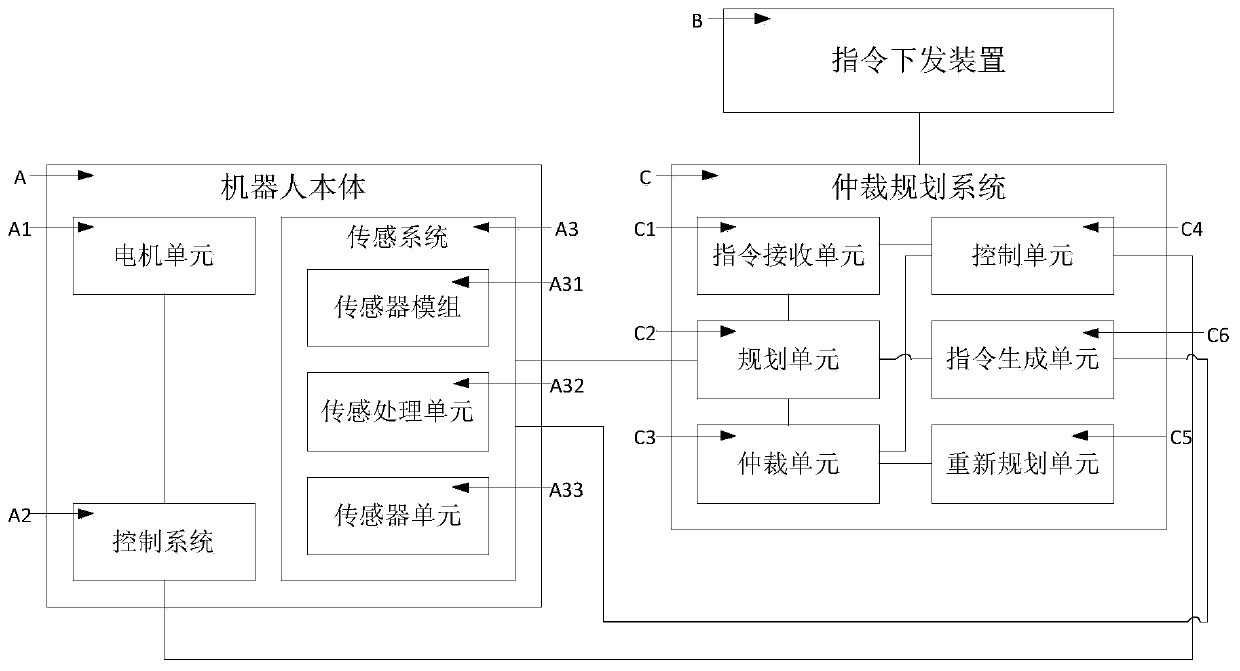
[0065] The intelligent robot used in the arbitration planning system has a robot body A and an instruction issuing device B connected to the robot body A. The user sends planning instructions to the robot body A through the instruction issuing device B. The planning instructions are used to instruct the robot body A Execute a predetermined execution plan;
[0066] The robot body A includes multiple limb rigid bodies, and multiple movable joints connecting adjacent limb rigid bodies. Each movable joint is connected to a motor unit A1, and the motor unit A1 is used to control the corresponding movable joints to move ( figure 1 On...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More