

Collaborative flight path intelligent planning method for formation flying of unmanned planes under dynamic environment
A technology of formation flight and dynamic environment, which is applied in the field of intelligent track planning and collaborative track planning, and can solve problems such as track re-planning and collaborative reconstruction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention provides an intelligent planning method for UAV formation flight cooperative track in a dynamic environment. In order to make the purpose, technical solution and effect of the present invention clearer and clearer, the present invention is further described in detail with reference to the accompanying drawings and examples. It should be understood that the specific implementations described here are only used to explain the present invention, not to limit the present invention.
[0044] The method for intelligently planning the cooperative track of UAV formation flight in a dynamic environment according to the present invention is specifically in accordance with the following steps.
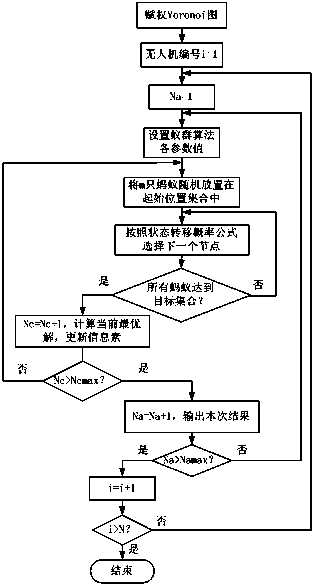
[0045] Step 1. Complete the planning of the offline pre-flight collaborative track of the UAV formation based on the Voronoi diagram and the ant colony algorithm. When the formation scale is large, the target is too large to hide when the formation is used as a whole ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More