

Feature ball based classifying method of three-dimensional point-cloud data of outdoor scene
A three-dimensional point cloud and data technology, applied in image data processing, image analysis, instruments, etc., can solve the problems of imperfect point cloud feature vector structure, complex topology structure, inaccurate point cloud segmentation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0038] The present invention will be further described below in conjunction with accompanying drawing.
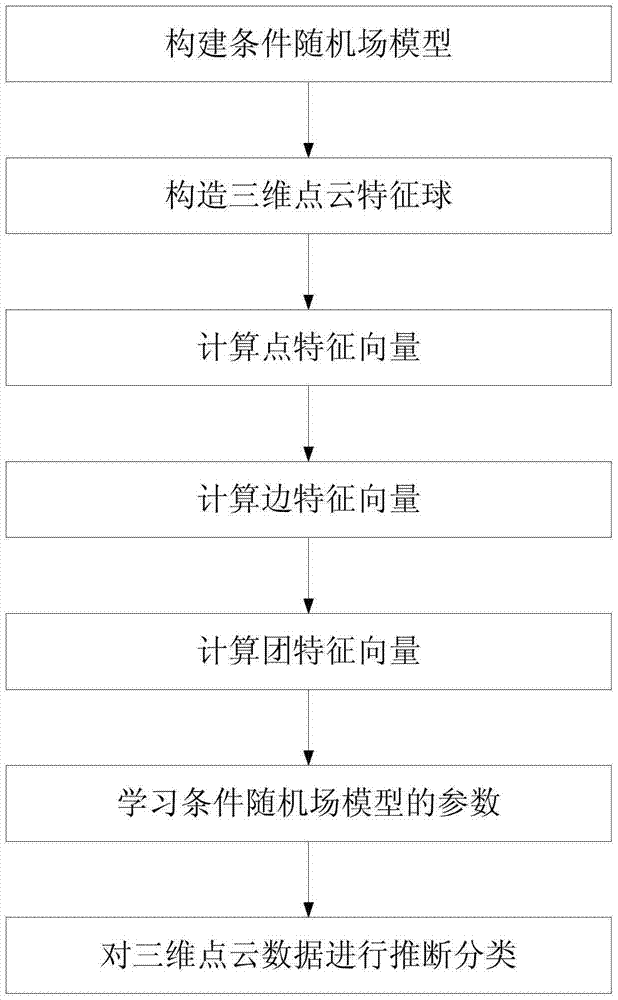
[0039] Such as figure 1 As shown, a classification method for 3D point cloud data of outdoor scenes based on feature spheres, including the following steps:
[0040] Step 1. Construct a conditional random field model: the conditional random field model is log P ( l | f ) = Σ i = 1 N Σ k = 1 K ( w n k · f i ) l i k + Σ ( ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More