

Mobile robot and its working method
A technology of mobile robots and working methods, applied in the field of mobile robots, can solve problems such as distance recognition errors, inability to cope with path changes, and inability to ensure accuracy, etc., to improve cleaning efficiency, prevent repeated unnecessary work, and increase walking speed Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] Advantages and features of the present invention and methods for achieving them can be made clearer by referring to the embodiments described in detail with reference to the accompanying drawings. However, the present invention is not limited to the embodiments disclosed below, and can be implemented in various ways. This embodiment is only used to make the disclosure of the present invention more complete, and to enable ordinary people in the technical field to which the present invention pertains to be implemented. Persons will more completely understand the scope of the invention, and the invention is only defined according to the claimed scope of the invention. Throughout the specification, the same reference numerals denote the same structural elements.
[0025] Hereinafter, embodiments of the present invention will be specifically described with reference to the accompanying drawings.
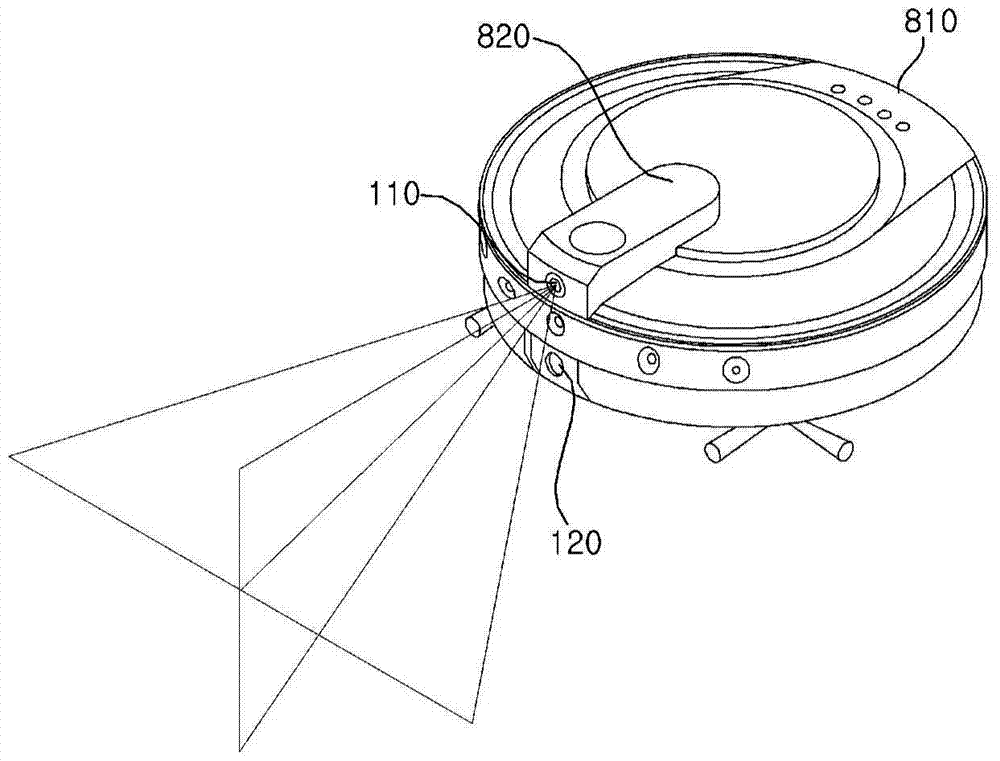
[0026] figure 1 is a perspective view illustrating a mobile robot according...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More