

Gap type negative pressure adsorption wall-climbing robot
A wall-climbing robot and gap-type technology, applied in the field of wall-climbing robots, can solve the problems of poor applicability of the wall surface, large walking resistance of the robot, and inability to move continuously, and achieve the effect of reducing walking resistance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further explained below in conjunction with the embodiments and accompanying drawings, but this should not be used as a limitation to the protection scope of the present application.
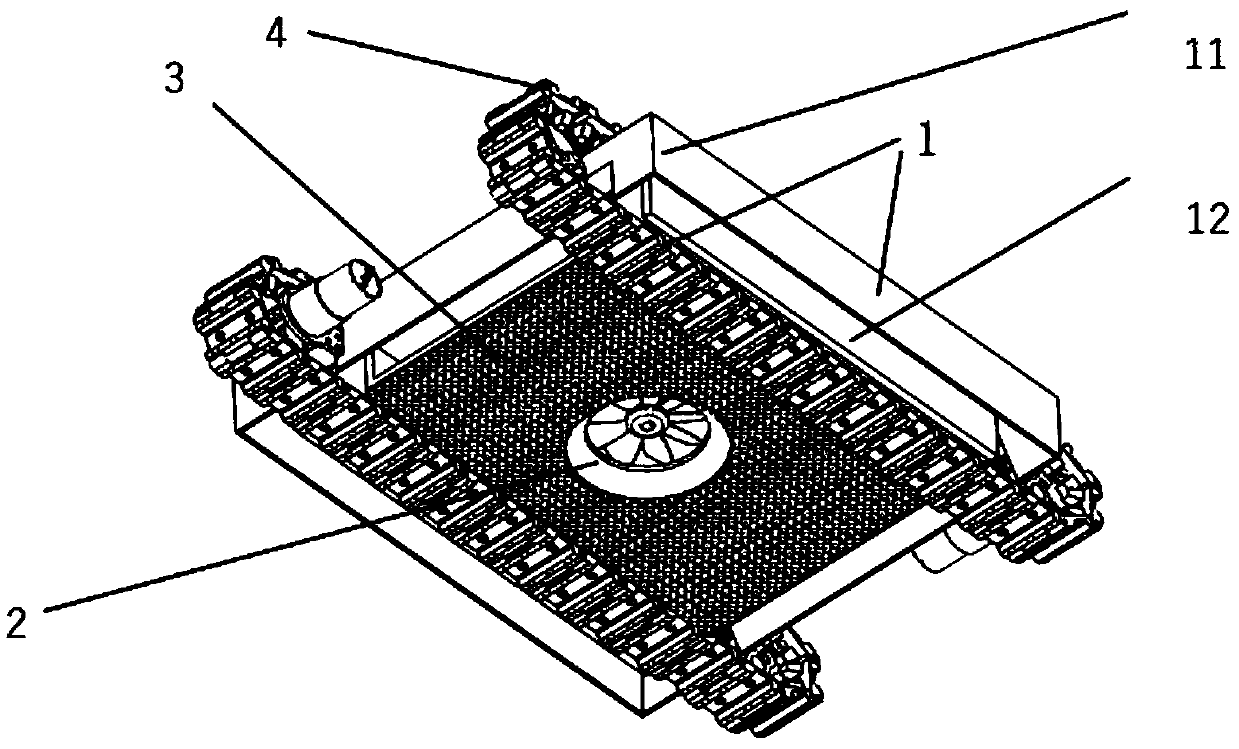
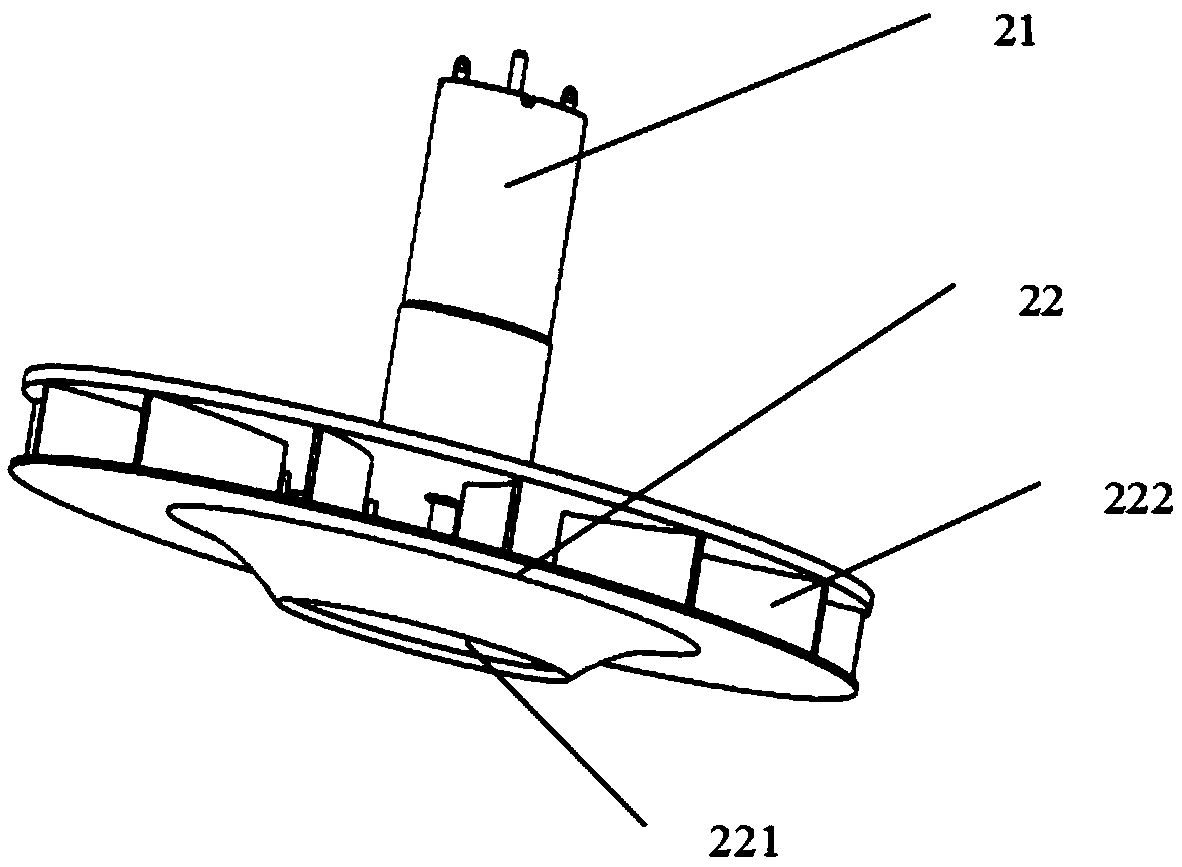
[0035] The gap-type negative pressure adsorption wall-climbing robot of the present invention includes a bottom plate, a negative pressure generating device, a sealing device, a traveling device, and an electric control device for supplying power and real-time control to the negative pressure generating device and the traveling device. The unit includes a high-speed motor and a centrifugal fan,
[0036] The traveling device is a double crawler structure, including left and right crawlers 43 and its fixing mechanism 41 and drive motor 42;
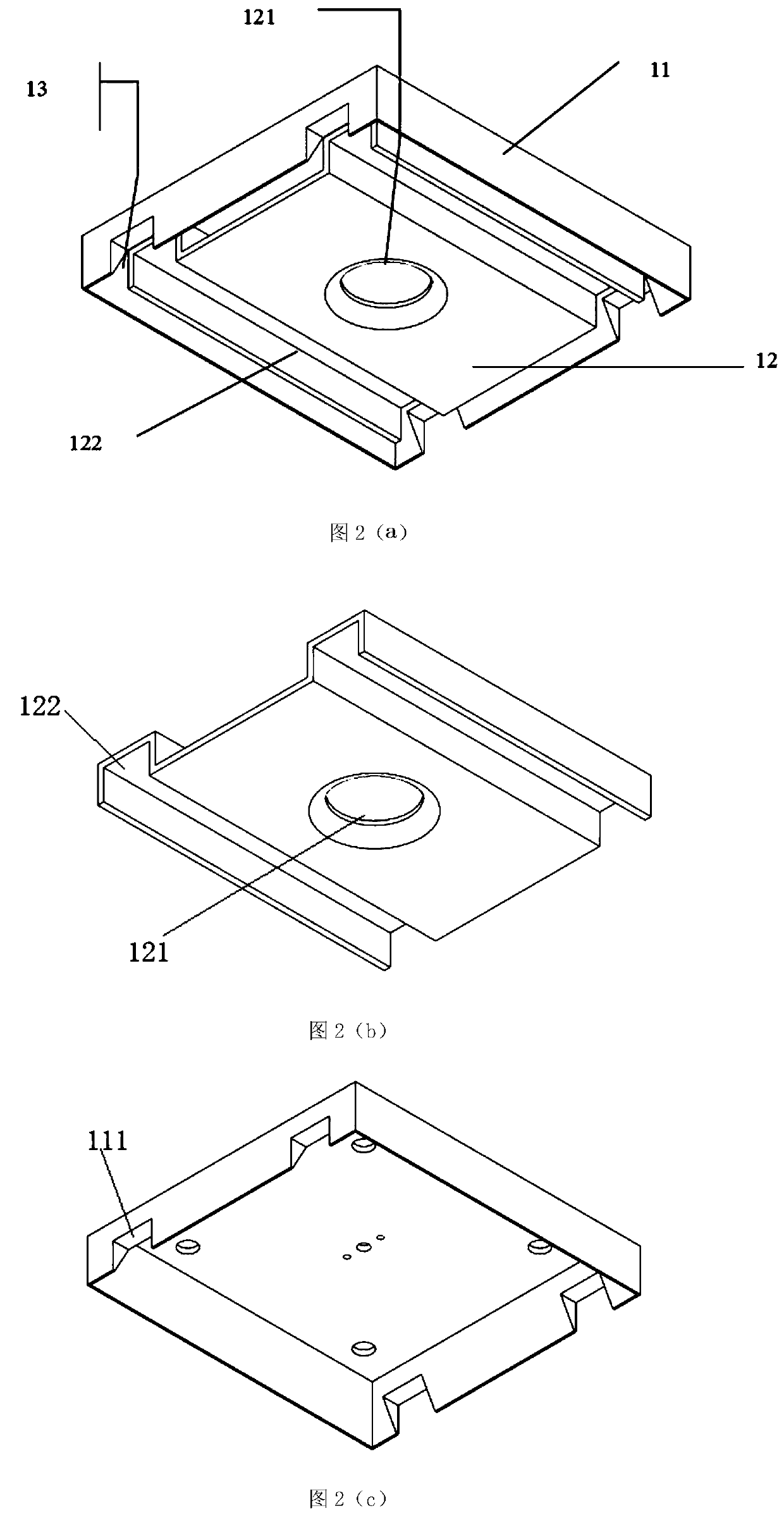
[0037] The base plate includes an upper base plate and a lower base plate. The upper base plate is covered on the lower base plate. The lower base plate is suspended below the upper base plate through pillars. There is an a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More