

A non-contact wheeled wall-climbing robot chassis device
A wall-climbing robot, non-contact technology, applied in the field of wall-climbing robots, can solve problems such as insufficient utilization of magnets, and achieve the effects of reducing overall weight, reducing walking resistance, and improving over-curve
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
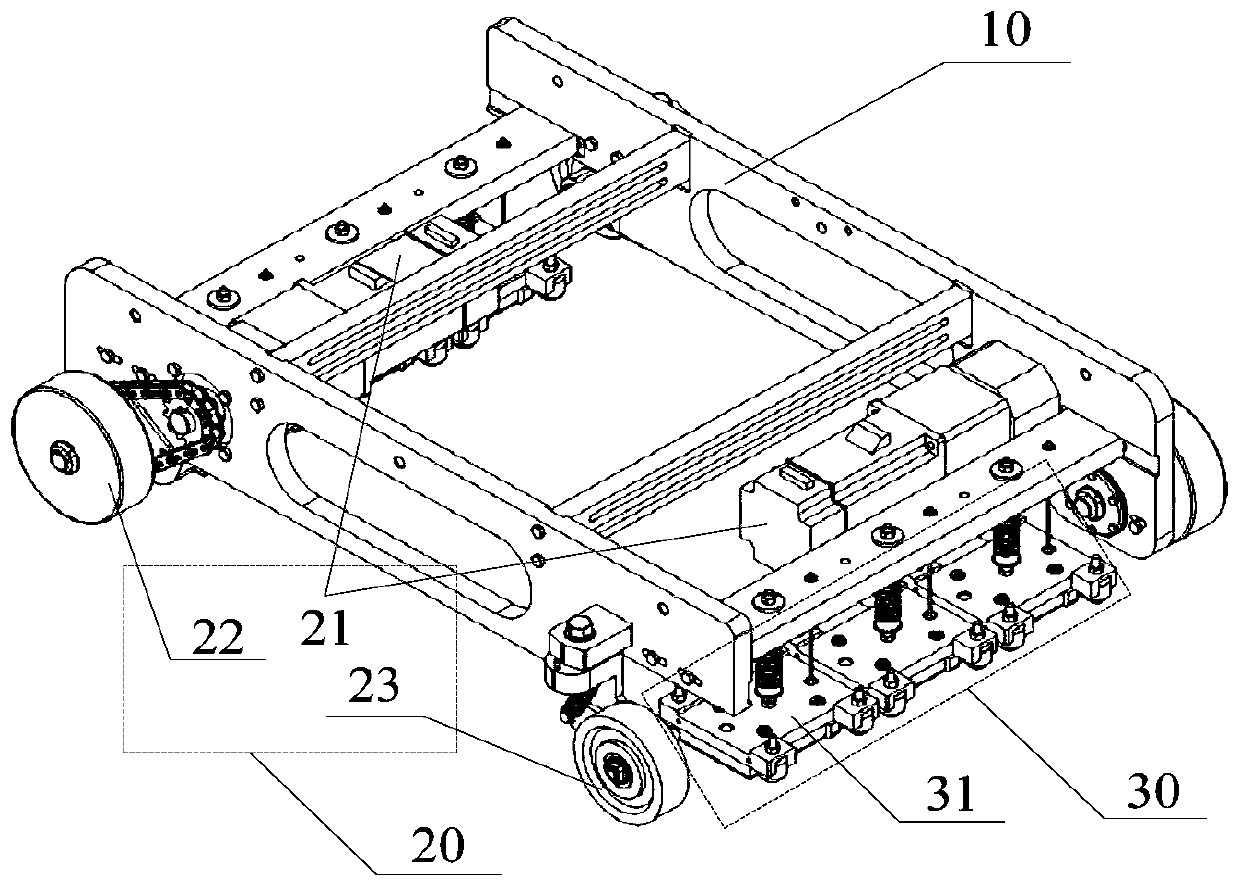
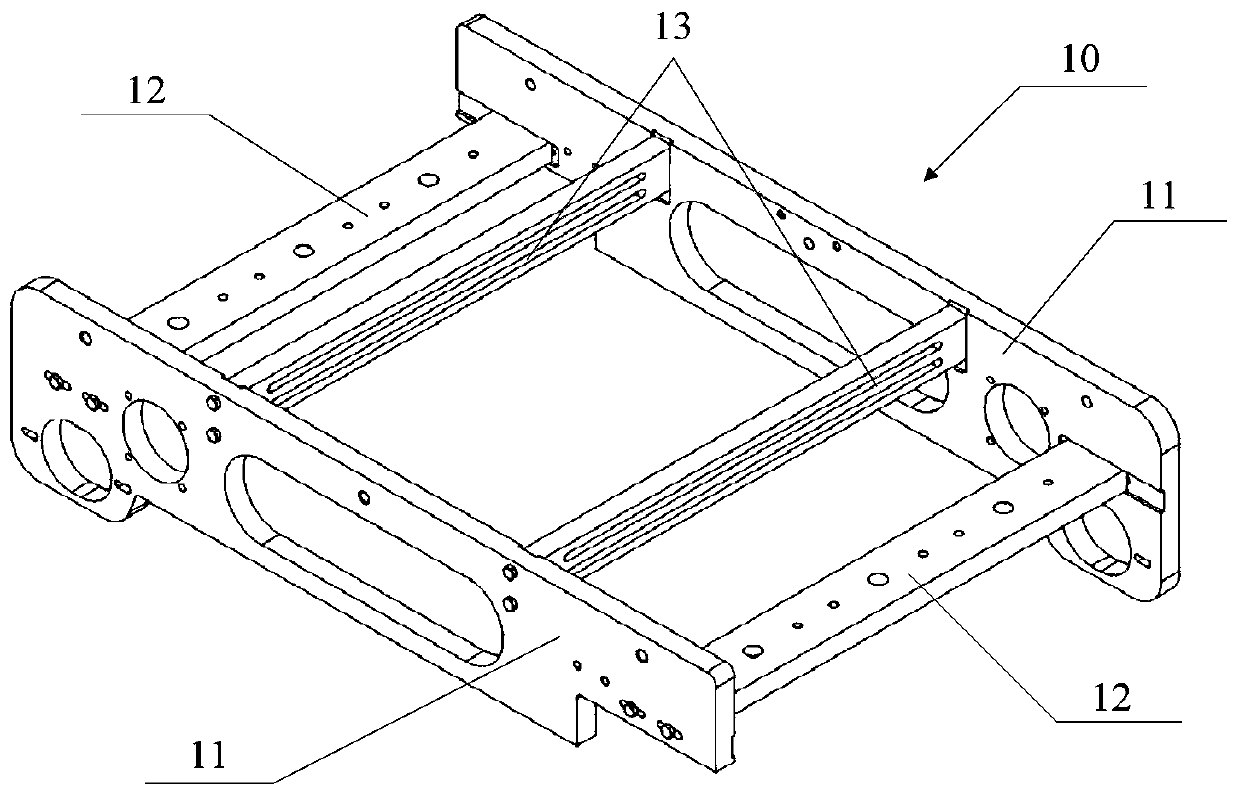
[0025] This application discloses a chassis device of a non-contact wheeled wall-climbing robot. For the assembly structure diagram of the chassis device, please refer to figure 1 , the chassis device mainly includes a vehicle frame 10 , a drive system 20 and two sets of permanent magnetic adsorption assemblies 30 . Vehicle frame 10 is the bearing platform of the whole chassis device, its structural diagram please refer to figure 2 , the vehicle frame 10 comprises two longitudinal beams 11 positioned at both sides of the wall-climbing robot, two lower beams 12 positioned at two ends of the wall-climbing robot, and two upper beams 13 positioned at the top of the chassis device, the lower beams 12 and the upper beams 13 are respectively connected to The two longitudinal beams 11 on both sides are welded together to form an H-shaped structure...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More