

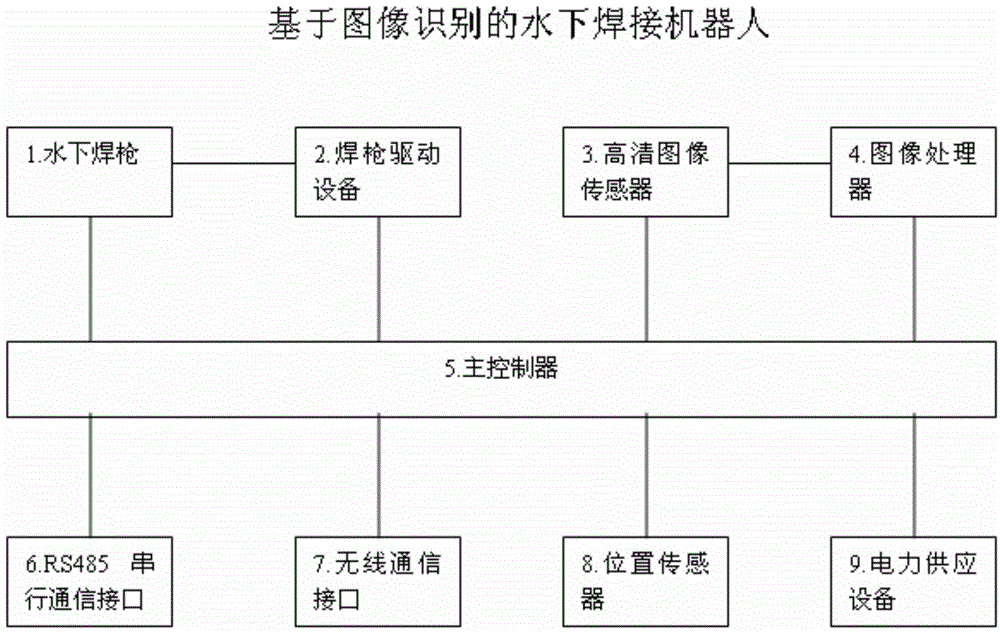
Underwater welding robot based on image identification
An underwater welding and image recognition technology, applied in welding equipment, welding accessories, arc welding equipment, etc., can solve the problems of being unable to automatically find the weld seam of the workpiece to be welded, low automation level, waste of manpower and material resources, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The implementation of the image recognition-based underwater welding robot of the present invention will be described in detail below with reference to the accompanying drawings.
[0015] With the start of a large number of bridge infrastructure projects and the development of the offshore oil and gas industry, there are more and more underwater operations. Due to the particularity of the underwater environment, operators can no longer normally perform workpiece welding operations like on land. , but can only use welding tools instead of welding in the water. Among them, the most commonly used equipment is the underwater welding robot.
[0016] The existing underwater welding robot has a welding torch driving mechanism and a workpiece image acquisition mechanism, which can send the real-time working conditions of the welding workpiece to the control equipment on the water surface for reference by the operator, and the operator can also drive the welding torch in real tim...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More