

All-around wheeled mobile robot with relative posture detection function
A mobile robot, relative pose technology, applied in the field of mobile robots, can solve the problems of limited friction, weak omni-directional wheel load capacity, mobile chassis speed fluctuations, etc., to achieve the effect of smooth movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
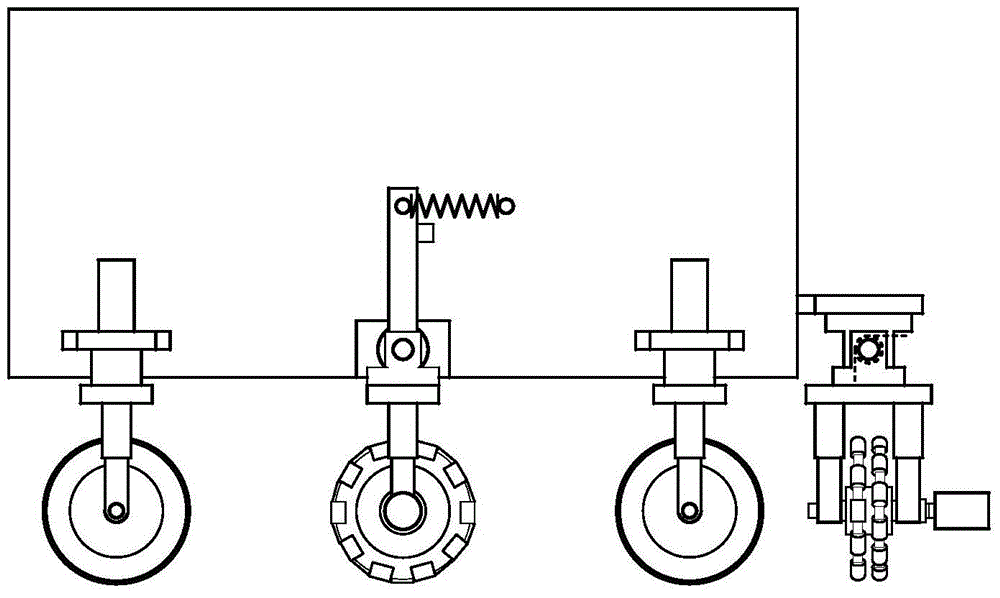
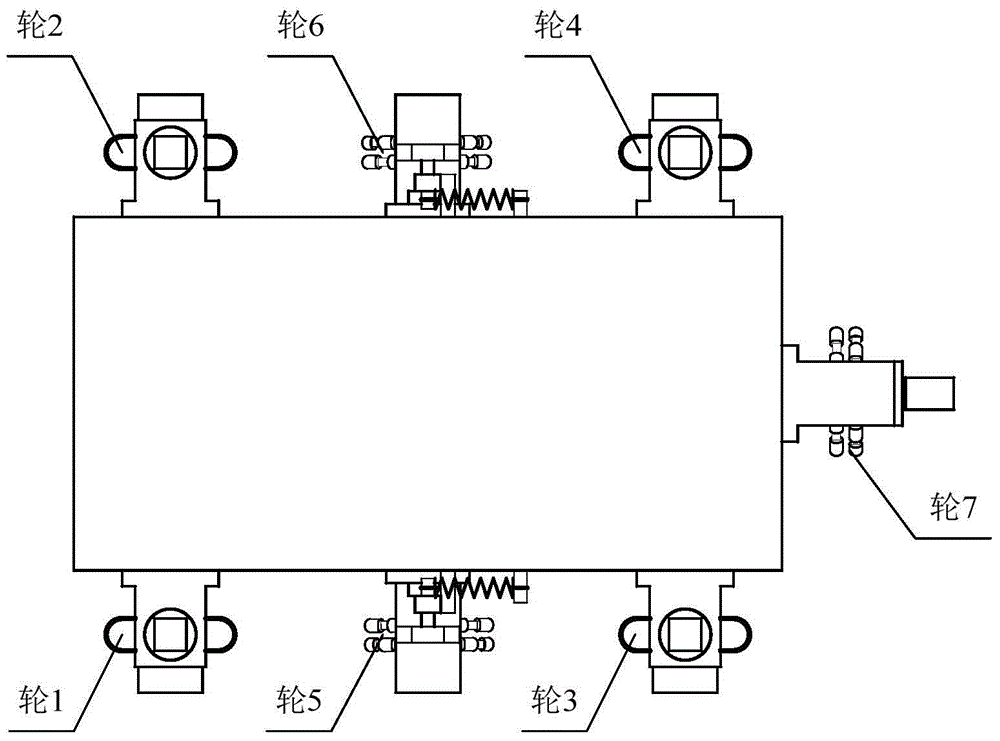
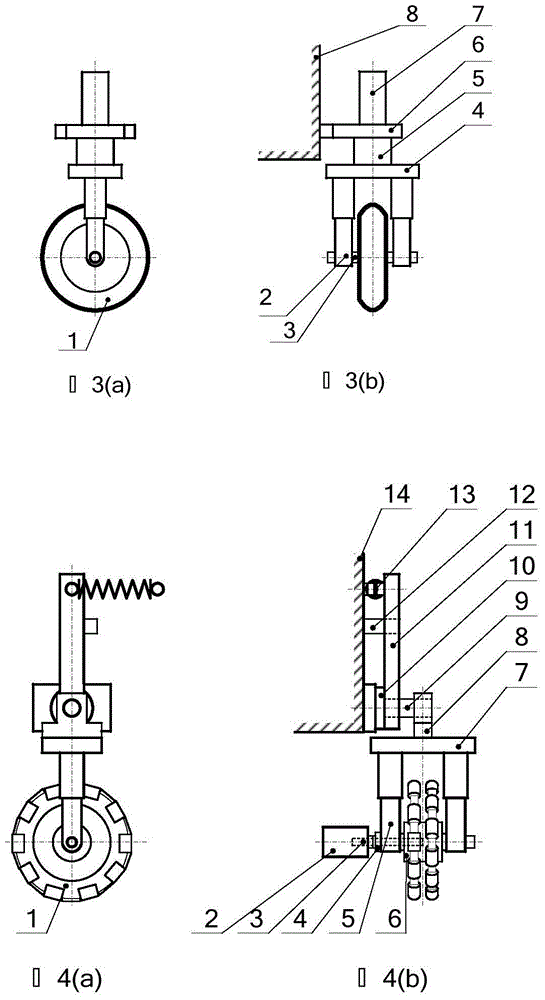
[0090] See attached figure 1 , 2 , an all-round wheeled mobile robot with relative pose detection function, including a chassis, four driving wheel mechanisms and three driven wheel mechanisms are installed on the chassis, and the driving wheel mechanisms are symmetrically installed on both sides of the chassis as The walking mechanism of the robot includes a hub motor, a shock absorber, a reducer, and a servo motor. The servo motor is decelerated by the reducer to drive the hub motor to rotate horizontally within ±90° around its vertical central axis, and is controlled through program coordination The rotation speed of the four wheel hub motors and the rotation angle of the four steering servo motors enable the robot to have various complex motion functions such as straight travel, oblique travel and steering; the driven wheel mechanisms are respectively installed in the middle position on both sides of the chassis and the middle position of the tail To detect the relative p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More