Transmitting event signal
An event signal and event technology, applied in railway signal and safety, electrical components, multiplex communication, etc., can solve problems such as travel time deviation and difficulties
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
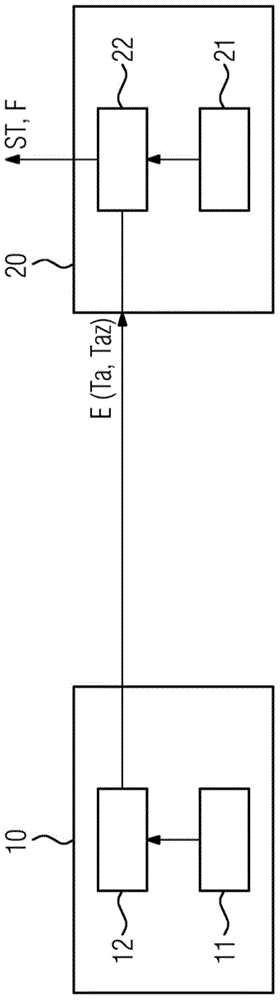
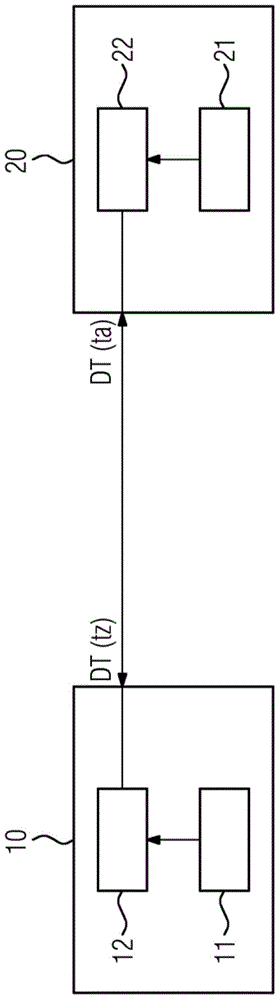
[0030] exist figure 1 A device with a signal generator 10 and a signal receiver 20 can be seen in FIG.
[0031] The signal generator 10 has a time reference 11 and a control device 12 which can be, for example, a programmable computing device. The signal receiver 20 has a time reference 21 and a control device 22 . The control device 22 can also be, for example, a programmable computing device.
[0032] If the control device 12 of the signal generator 10 determines that an event has occurred which should be reported to the signal receiver 20, the signal generator generates a corresponding event signal E(Ta, Taz). The event signal E(Ta, Taz) describes the event that occurred and specifies the event time, ie the event time Ta as the time reference 11 according to the signal generator 10 . Furthermore, the event signal E(Ta, Taz) gives the event time point Taz according to the time reference 21 of the signal receiver 20 . Because the control device 12 of the signal generator ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com